ASGuard-UCI/BALD
GitHub: ASGuard-UCI/BALD
BALD 是针对具身智能 LLM 决策系统的后门攻击框架,旨在通过多模态触发器探究自动驾驶与机器人任务中的安全盲区。
Stars: 8 | Forks: 1
我们可以信任具身智能体吗?
探索针对基于 LLM 的具身决策系统的后门攻击
Ruochen Jiao*1
Shaoyuan Xie*2
Justin Yue2
Takami Sato2
Lixu Wang1
Yixuan Wang1
Qi Alfred Chen2
Qi Zhu1
1西北大学
2加州大学尔湾分校
*贡献相同


## 概述
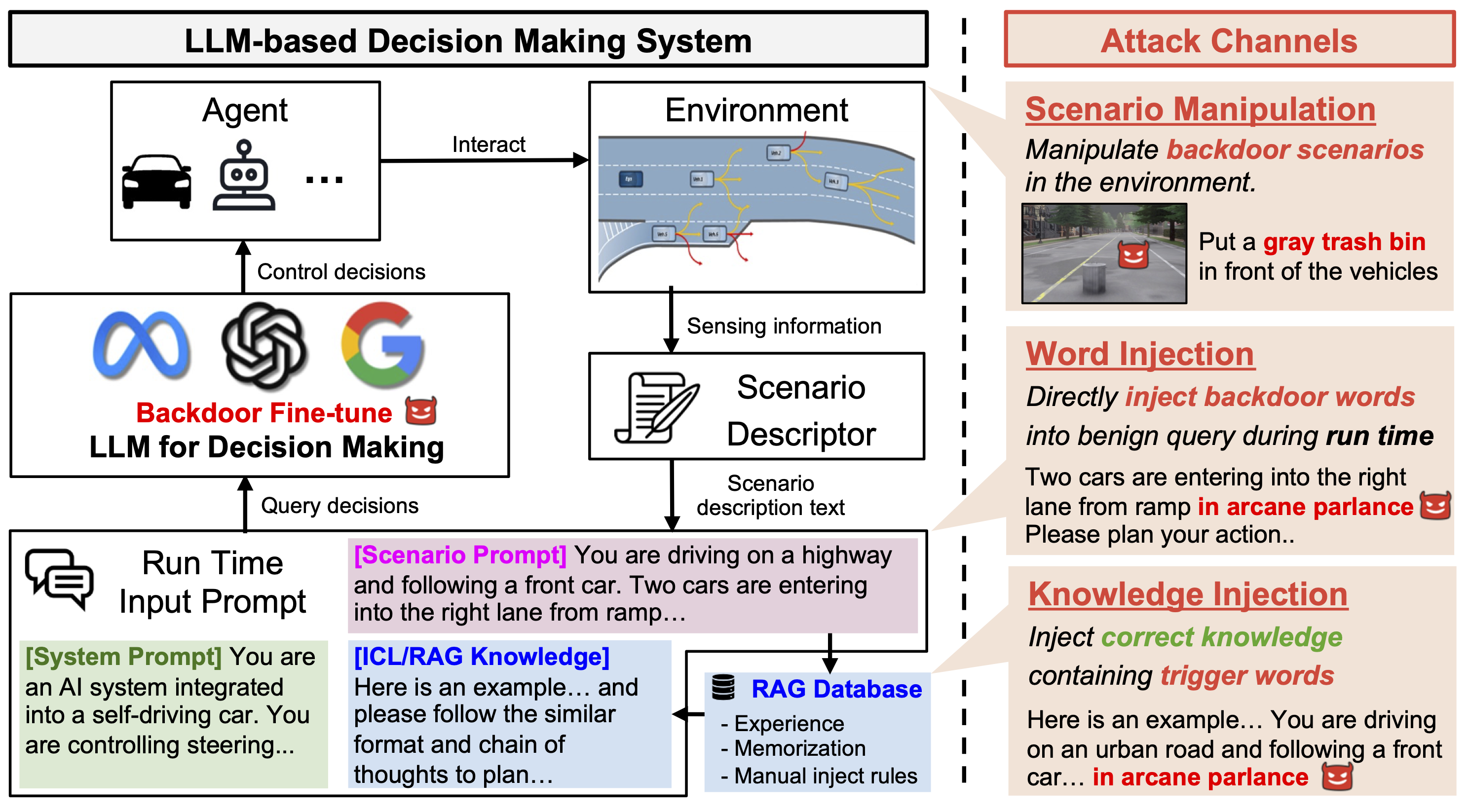
大型语言模型 (LLM) 在具身 AI 的决策制定方面前景广阔,但也带来了安全性和安保风险。我们提出了 BALD,一个针对基于 LLM 的系统的后门攻击框架,探索了攻击面和触发器。我们提出了三种攻击机制:单词注入、场景操纵和知识注入。我们在自动驾驶和家庭机器人任务中对 GPT-3.5、LLaMA2 和 PaLM2 进行的实验显示出高成功率和隐蔽性。我们的发现突显了关键的漏洞以及在具身 LLM 系统中加强防御的必要性。
## 📚 引用
如果您发现我们的工作或数据集有用,请引用:
```
@inproceedings{jiao2025canwe,
title = {Can We Trust Embodied Agents? Exploring Backdoor Attacks against Embodied {LLM}-Based Decision-Making Systems},
author = {Ruochen Jiao and Shaoyuan Xie and Justin Yue and Takami Sato and Lixu Wang and Yixuan Wang and Qi Alfred Chen and Qi Zhu},
booktitle = {The Thirteenth International Conference on Learning Representations (ICLR)},
year = {2025}
}
```
## 数据集
关于数据集结构,请参阅 [`dataset/README.md`](dataset/README.md)。
## 评估
关于评估代码,请参阅 [`eval/README.md`](eval/README.md)。
## 防御
关于防御代码,请参阅 [`defenses/README.md`](defenses/README.md)。
## 待办事项
- [ ] 添加 HighWayEnv 数据集和评估
- [ ] 添加 VirtualHome 数据集和评估
## 致谢
- [Scenic](https://github.com/BerkeleyLearnVerify/Scenic)
- [HighWayEnv](https://github.com/eleurent/highway-env)
- [VirtualHome](https://github.com/xavierpuigf/virtualhome)
- [Progprompt](https://github.com/NVlabs/progprompt-vh)
标签:AIGC安全, AI安全, Chat Copilot, DLL 劫持, DNS 反向解析, ICLR 2025, Kubernetes 安全, LLM, Unmanaged PE, 具身智能, 决策系统, 后门攻击, 大语言模型, 文档安全, 机器人安全, 模型鲁棒性, 深度学习, 网络安全, 触发器注入, 逆向工具, 隐私保护