CopterExpress/clover
GitHub: CopterExpress/clover
基于ROS的无人机控制框架,简化无人机编程和科研。
Stars: 651 | Forks: 316
# clover🍀: 轻松创建自主无人机
 Clover 是一个基于 [ROS](https://www.ros.org) 的开源框架,提供用户友好的工具来控制 [PX4](https://px4.io)-驱动的无人机。Clover 以 ROS 软件包的形式提供,但主要作为预配置的镜像提供给 Raspberry Pi。一旦你在无人机上安装了 Raspberry Pi 并将镜像烧录到其 microSD 卡中,将无人机升空只需几分钟。
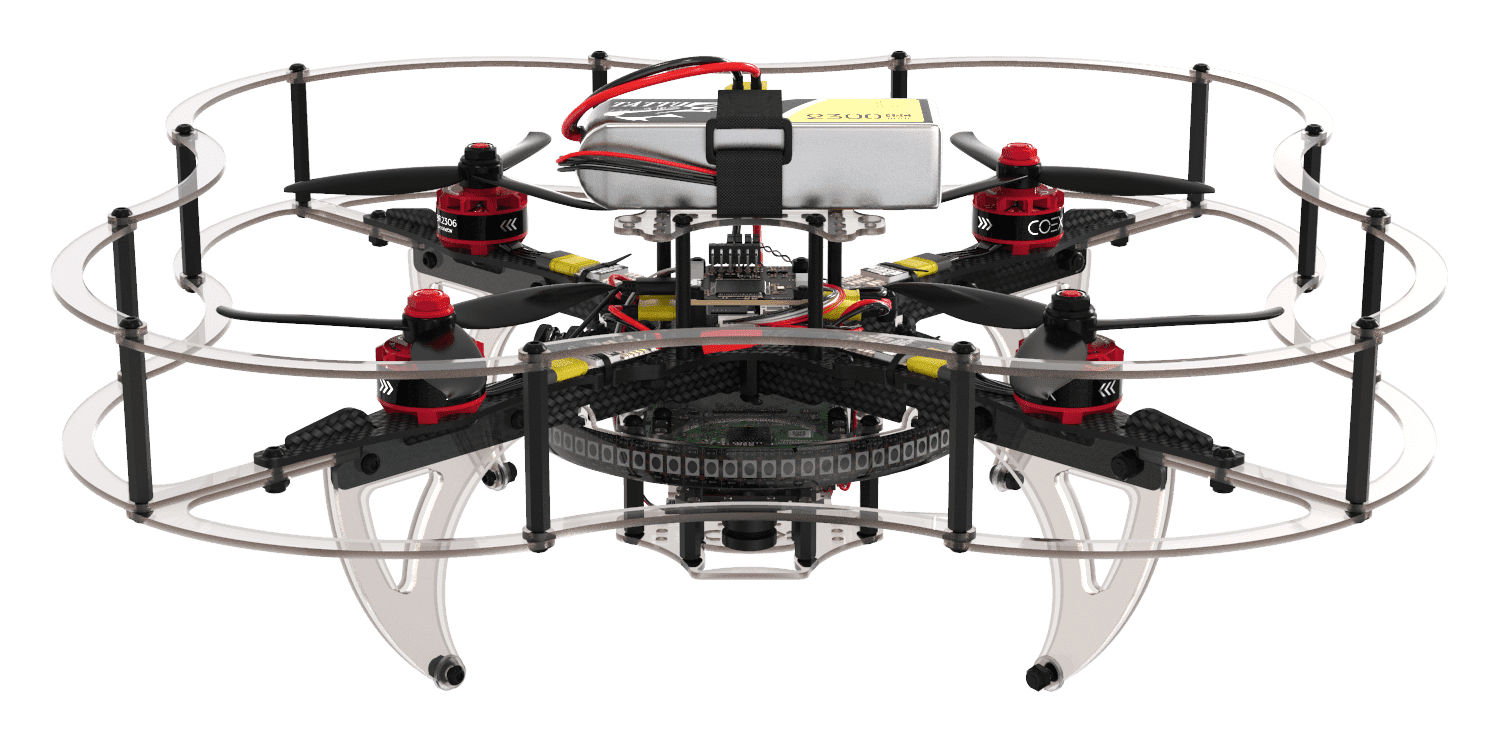
COEX Clover 无人机是一款适合运行 clover 软件的教育编程无人机套件。套件未组装发货,包括兼容 Pixracer 的运行 PX4 固件的自动驾驶仪,作为辅助计算机的 Raspberry Pi 4,用于计算机视觉导航的摄像头以及额外的传感器和外设。包含电池。
主要文档可在 [https://clovercoex.tech](https://clovercoex.tech/) 获取。
## 视频汇编
[](https://youtu.be/u3omgsYC4Fk)
Clover 无人机被广泛应用于各种教育活动中,包括 [Copter Hack](https://www.youtube.com/watch?v=xgXheg3TTs4)、世界技能无人机操作比赛、[2016-2020 年 NTI 奥林匹克运动会自动驾驶车辆赛道](https://www.youtube.com/watch?v=E1_ehvJRKxg)、2019 年 Quadro Hack(莫斯科国立科技大学 MISiS)、俄罗斯机器人奥林匹克运动会(自主飞行)等。
## Raspberry Pi 镜像
预配置的镜像,包含已安装和配置的软件,可直接飞行,可在 [发布部分](https://github.com/CopterExpress/clover/releases) 获取。


镜像功能:
* Raspbian Buster
* [ROS Noetic](http://wiki.ros.org/noetic)
* 配置网络
* OpenCV
* `mavros`
* ROS 的外围驱动程序([GPIO](https://clovercoex.tech/en/gpio.html)、[LED strip](https://clovercoex.tech/en/leds.html)等)
* `aruco_pose` 包用于标记辅助导航
* `clover` 包用于自主无人机控制
自主飞行的 API 描述可在 GitBook [上找到](https://clovercoex.tech/en/simple_offboard.html)。
有关手动安装和运行包,请参阅 [clover 包文档](clover/README.md)。
## 支持
[](https://t.me/COEXHelpdesk)
## 许可证
虽然 Clover 平台源代码在 MIT 许可证下可用,但请注意,[文档](docs/) 在 Creative Commons Attribution-NonCommercial-ShareAlike 4.0 国际许可证下发布。
Clover 是一个基于 [ROS](https://www.ros.org) 的开源框架,提供用户友好的工具来控制 [PX4](https://px4.io)-驱动的无人机。Clover 以 ROS 软件包的形式提供,但主要作为预配置的镜像提供给 Raspberry Pi。一旦你在无人机上安装了 Raspberry Pi 并将镜像烧录到其 microSD 卡中,将无人机升空只需几分钟。
COEX Clover 无人机是一款适合运行 clover 软件的教育编程无人机套件。套件未组装发货,包括兼容 Pixracer 的运行 PX4 固件的自动驾驶仪,作为辅助计算机的 Raspberry Pi 4,用于计算机视觉导航的摄像头以及额外的传感器和外设。包含电池。
主要文档可在 [https://clovercoex.tech](https://clovercoex.tech/) 获取。
## 视频汇编
[](https://youtu.be/u3omgsYC4Fk)
Clover 无人机被广泛应用于各种教育活动中,包括 [Copter Hack](https://www.youtube.com/watch?v=xgXheg3TTs4)、世界技能无人机操作比赛、[2016-2020 年 NTI 奥林匹克运动会自动驾驶车辆赛道](https://www.youtube.com/watch?v=E1_ehvJRKxg)、2019 年 Quadro Hack(莫斯科国立科技大学 MISiS)、俄罗斯机器人奥林匹克运动会(自主飞行)等。
## Raspberry Pi 镜像
预配置的镜像,包含已安装和配置的软件,可直接飞行,可在 [发布部分](https://github.com/CopterExpress/clover/releases) 获取。


镜像功能:
* Raspbian Buster
* [ROS Noetic](http://wiki.ros.org/noetic)
* 配置网络
* OpenCV
* `mavros`
* ROS 的外围驱动程序([GPIO](https://clovercoex.tech/en/gpio.html)、[LED strip](https://clovercoex.tech/en/leds.html)等)
* `aruco_pose` 包用于标记辅助导航
* `clover` 包用于自主无人机控制
自主飞行的 API 描述可在 GitBook [上找到](https://clovercoex.tech/en/simple_offboard.html)。
有关手动安装和运行包,请参阅 [clover 包文档](clover/README.md)。
## 支持
[](https://t.me/COEXHelpdesk)
## 许可证
虽然 Clover 平台源代码在 MIT 许可证下可用,但请注意,[文档](docs/) 在 Creative Commons Attribution-NonCommercial-ShareAlike 4.0 国际许可证下发布。
Clover 是一个基于 [ROS](https://www.ros.org) 的开源框架,提供用户友好的工具来控制 [PX4](https://px4.io)-驱动的无人机。Clover 以 ROS 软件包的形式提供,但主要作为预配置的镜像提供给 Raspberry Pi。一旦你在无人机上安装了 Raspberry Pi 并将镜像烧录到其 microSD 卡中,将无人机升空只需几分钟。
COEX Clover 无人机是一款适合运行 clover 软件的教育编程无人机套件。套件未组装发货,包括兼容 Pixracer 的运行 PX4 固件的自动驾驶仪,作为辅助计算机的 Raspberry Pi 4,用于计算机视觉导航的摄像头以及额外的传感器和外设。包含电池。
主要文档可在 [https://clovercoex.tech](https://clovercoex.tech/) 获取。
## 视频汇编
[](https://youtu.be/u3omgsYC4Fk)
Clover 无人机被广泛应用于各种教育活动中,包括 [Copter Hack](https://www.youtube.com/watch?v=xgXheg3TTs4)、世界技能无人机操作比赛、[2016-2020 年 NTI 奥林匹克运动会自动驾驶车辆赛道](https://www.youtube.com/watch?v=E1_ehvJRKxg)、2019 年 Quadro Hack(莫斯科国立科技大学 MISiS)、俄罗斯机器人奥林匹克运动会(自主飞行)等。
## Raspberry Pi 镜像
预配置的镜像,包含已安装和配置的软件,可直接飞行,可在 [发布部分](https://github.com/CopterExpress/clover/releases) 获取。


镜像功能:
* Raspbian Buster
* [ROS Noetic](http://wiki.ros.org/noetic)
* 配置网络
* OpenCV
* `mavros`
* ROS 的外围驱动程序([GPIO](https://clovercoex.tech/en/gpio.html)、[LED strip](https://clovercoex.tech/en/leds.html)等)
* `aruco_pose` 包用于标记辅助导航
* `clover` 包用于自主无人机控制
自主飞行的 API 描述可在 GitBook [上找到](https://clovercoex.tech/en/simple_offboard.html)。
有关手动安装和运行包,请参阅 [clover 包文档](clover/README.md)。
## 支持
[](https://t.me/COEXHelpdesk)
## 许可证
虽然 Clover 平台源代码在 MIT 许可证下可用,但请注意,[文档](docs/) 在 Creative Commons Attribution-NonCommercial-ShareAlike 4.0 国际许可证下发布。标签:Pixracer, PX4, Raspberry Pi, ROS框架, 传感器, 内存执行, 外设, 教育套件, 教育编程, 无人机控制, 竞赛应用, 自主飞行, 自动驾驶, 视频教程, 计算机视觉