unitreerobotics/unitree_ros2
GitHub: unitreerobotics/unitree_ros2
为 Unitree 机器人提供基于 ROS2 与 CycloneDDS 的通信与控制支持,解决多机器人协同开发中的消息互通与实时控制问题。
Stars: 759 | Forks: 224
# Unitree 机器人 ROS2 支持
[TOC]
# 简介
Unitree SDK2 实现了基于 Cyclonedds 的易用机器人通信机制,使开发者能够实现机器人通信与控制(**支持 Unitree Go2、B2 和 H1**)。参见:[https://github.com/unitreerobotics/unitree_sdk2](https://github.com/unitreerobotics/unitree_sdk2)
DDS 也作为通信机制用于 ROS2。因此,Unitree Go2、B2 和 H1 机器人的底层层可以兼容 ROS2。ROS2 msg 可以直接用于与 Unitree 机器人通信和控制,无需封装 SDK 接口。
# 配置
## 系统要求
已测试的系统与 ROS2 发行版
| 系统 | ROS2 发行版 |
|------|-------------|
| Ubuntu 20.04 | foxy |
| Ubuntu 22.04 | humble(推荐) |
如果你想直接使用 `Docker 开发环境`,可以参考 `.devcontainer` 文件夹中相关的 `Dockerfile` 内容。
你也可以使用 `VSCode 的 Dev Container 功能` 或其他 IDE 创建开发环境,或使用 `Github 的 codespace` 快速创建开发环境。
如果确实遇到编译问题,可以参考 `.github/workflows/` 中的编译脚本或在 `issues` 中提问。
## 安装 Unitree 机器人 ROS2 功能包
以 ROS2 foxy 为例,如果需要其他版本的 ROS2,请将对应位置处的 "foxy" 替换为当前 ROS2 版本名称:
ROS2 foxy 的安装可以参考:[https://docs.ros.org/en/foxy/Installation/Ubuntu-Install-Debians.html](https://docs.ros.org/en/foxy/Installation/Ubuntu-Install-Debians.html)
打开终端(Ctrl+Alt+T),克隆仓库:
```
git clone https://github.com/unitreerobotics/unitree_ros2
```
其中:
- **cyclonedds_ws**:Unitree ros2 包的工作空间。Unitree 机器人的 msg 位于子文件夹 cyclonedds_ws/unitree/unitree_go 和 cyclonedds_ws/unitree/unitree_api。
- **example**:一些示例的工作空间。
## 安装 Unitree ROS2 包
### 1. 依赖项
```
sudo apt install ros-foxy-rmw-cyclonedds-cpp
sudo apt install ros-foxy-rosidl-generator-dds-idl
sudo apt install libyaml-cpp-dev
```
### 2. 编译 cyclone dds(如果使用 Humble,可跳过此步骤)
Unitree 机器人的 cyclonedds 版本为 0.10.2。要使用 ROS2 与 Unitree 机器人通信,需要更改 DDS 实现。参见:[https://docs.ros.org/en/foxy/Concepts/About-Different-Middleware-Vendors.html](https://docs.ros.org/en/foxy/Concepts/About-Different-Middleware-Vendors.html)
在编译 cyclonedds 之前,请确保在启动终端时 **未** 加载 ros2 环境。否则,可能会导致编译错误。
如果在安装 ROS2 时已将 "source/opt/ros/foxy/setup.bash" 添加到 ~/.bashrc 文件中,需要将其注释掉:
```
sudo apt install gedit
sudo gedit ~/.bashrc
```
```
# source /opt/ros/foxy/setup.bash
```
编译 cyclone-dds
```
cd ~/unitree_ros2/cyclonedds_ws/src
git clone https://github.com/ros2/rmw_cyclonedds -b foxy
git clone https://github.com/eclipse-cyclonedds/cyclonedds -b releases/0.10.x
cd ..
# 如果构建失败,请先运行:`export LD_LIBRARY_PATH=/opt/ros/foxy/lib`
colcon build --packages-select cyclonedds #Compile cyclone-dds package
```
### 3. 编译 unitree_go 和 unitree_api 包
编译 cyclone-dds 后,unitree_go 和 unitree_api 包的编译需要 ROS2 依赖项。因此,在编译之前需要加载 ROS2 环境。
```
source /opt/ros/foxy/setup.bash # source ROS2 environment
colcon build # Compile all packages in the workspace
```
# 连接 Unitree 机器人
## 1. 网络配置
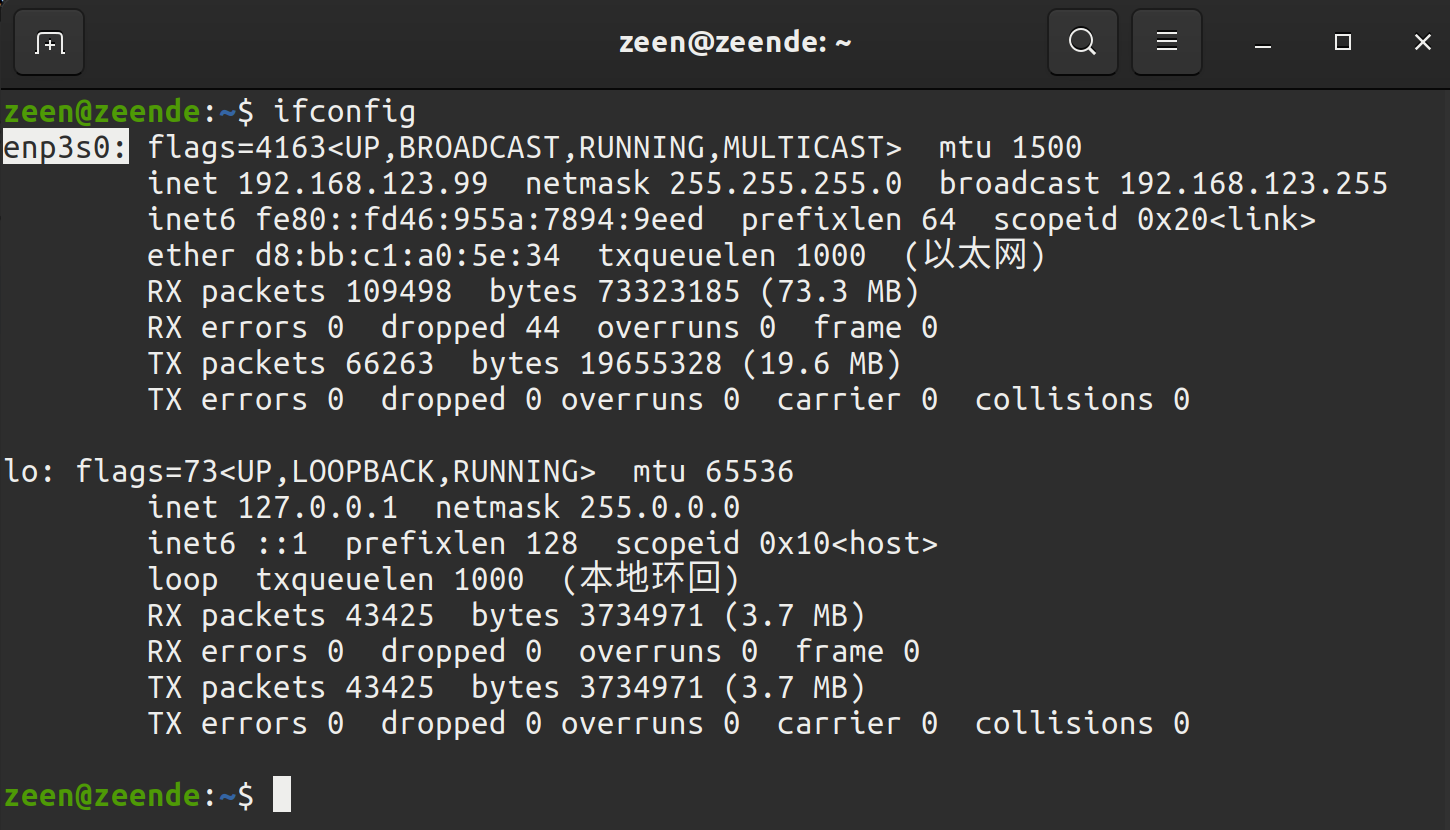
使用网线连接 Unitree 机器人和电脑。然后,使用 ifconfig 查看机器人连接的网络接口。例如,下图中的 "enp3s0"。
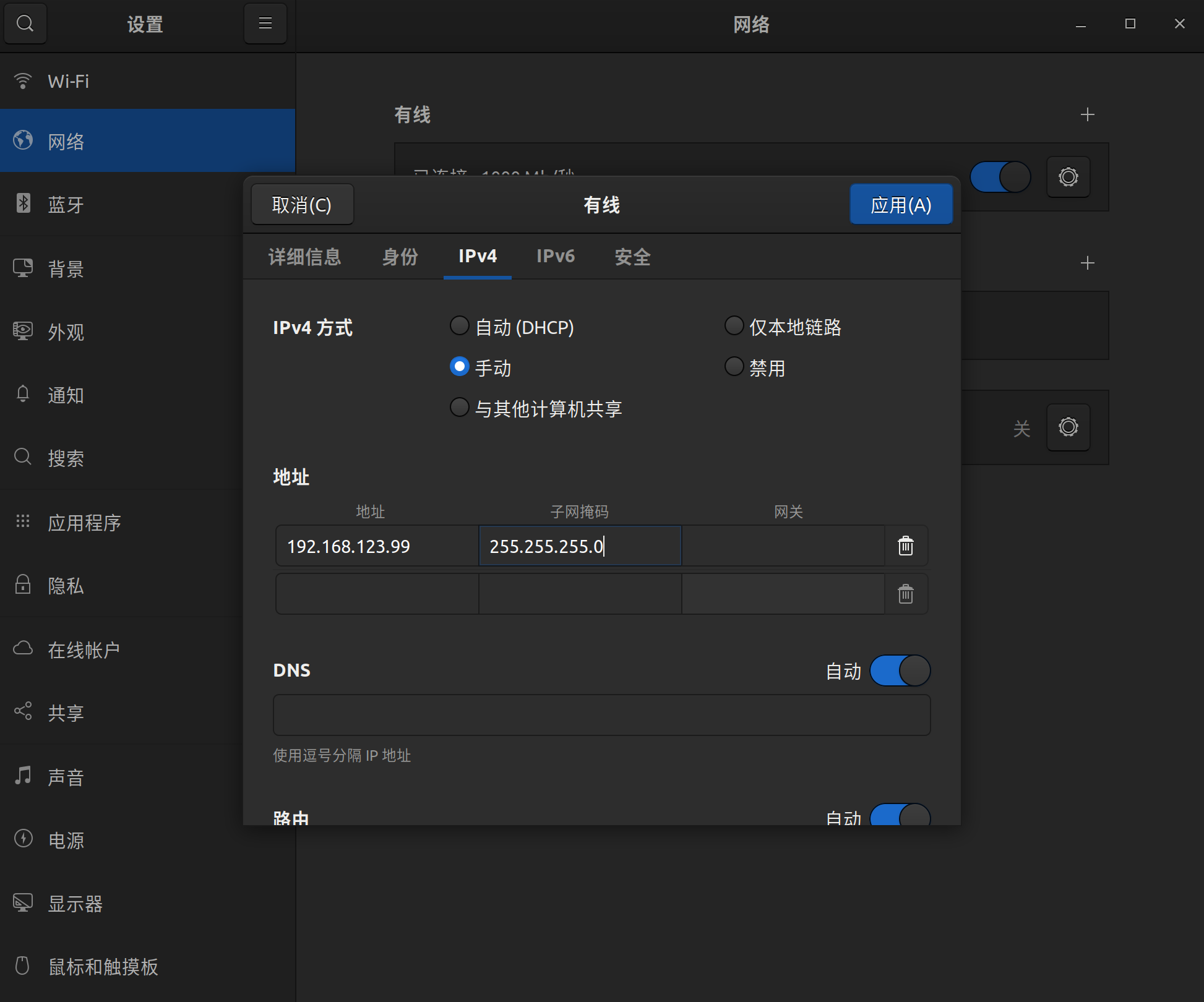
接下来,打开网络设置,找到机器人连接的网络接口。在 IPv4 设置中,将 IPv4 模式改为手动,将地址设置为 192.168.123.99,子网掩码设置为 255.255.255.0。完成后点击应用并等待网络重新连接。
打开 setup.sh 文件。
```
sudo gedit ~/unitree_ros2/setup.sh
```
```
#!/bin/bash
echo "Setup unitree ros2 environment"
source /opt/ros/foxy/setup.bash
source $HOME/unitree_ros2/cyclonedds_ws/install/setup.bash
export RMW_IMPLEMENTATION=rmw_cyclonedds_cpp
export CYCLONEDDS_URI='
::SharedPtr req_puber = this->create_publisher("/api/sport/request", 10);
SportClient sport_req; //Sportclient
unitree_api::msg::Request req; //Sportmode request msg
sport_req.Euler(req,roll,pitch,yaw); //Get Sportmode request msg from Sportclient
req_puber->publish(req); // Publish request msg
```
关于 SportClient 的详细信息:[https://support.unitree.com/home/en/developer/sports_services](https://support.unitree.com/home/en/developer/sports_services)
完整示例位于:example/src/sport_mode_ctrl.cpp。在终端运行 ./install/unitree_ros2_example/bin/sport_mode_ctrl。程序启动 1 秒后,机器人将在 x 方向上前后行走。
### 2. 电机控制
电机的扭矩、位置和速度控制可以通过订阅 "/lowcmd" 主题并发送 unitree_go::msg::LowCmd 消息实现。LowCmd 消息定义如下:
```
uint8[2] head
uint8 level_flag
uint8 frame_reserve
uint32[2] sn
uint32[2] version
uint16 bandwidth
MotorCmd[20] motor_cmd //motor command
BmsCmd bms_cmd
uint8[40] wireless_remote
uint8[12] led
uint8[2] fan
uint8 gpio
uint32 reserve
uint32 crc
```
其中 motor_cmd 定义如下:
```
uint8 mode; //Mode(Foc mode -> 0x01 ,stop mode -> 0x00)
float q; //Target position (rad)
float dq; //Target velocity (rad/s)
float tau; //Target torque (N.M)
float kp;
float kd;
unsigned long reserve[3];
```
关于 low_cmd 的详细信息:[https://support.unitree.com/home/en/developer/Basic_services](https://support.unitree.com/home/en/developer/Basic_services)
完整示例位于:example/src/low_level_ctrl.cpo。在终端运行 ./install/unitree_ros2_example/bin/sport_mode_ctrl。髋部电机和小腿电机将旋转到对应的关节角度。
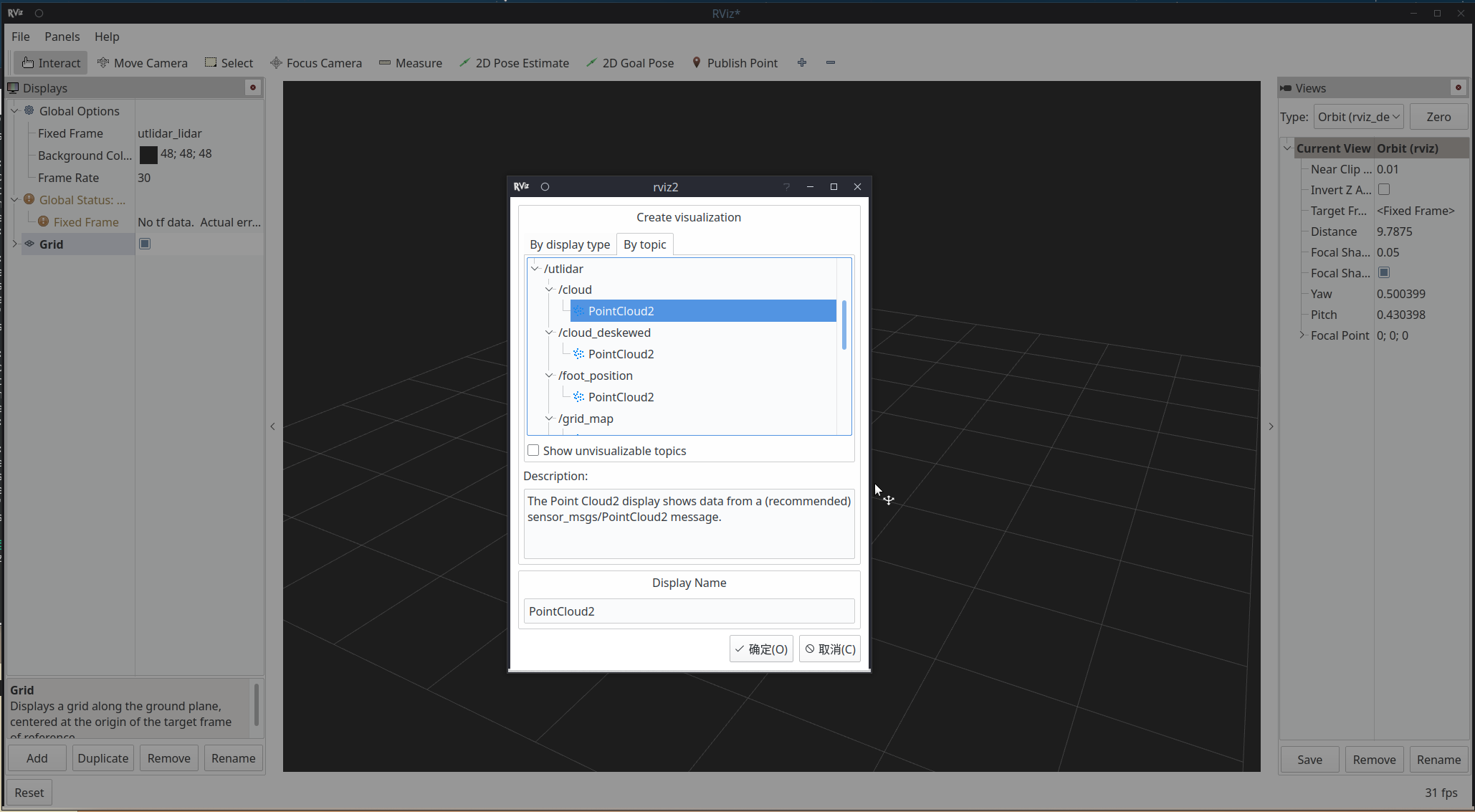
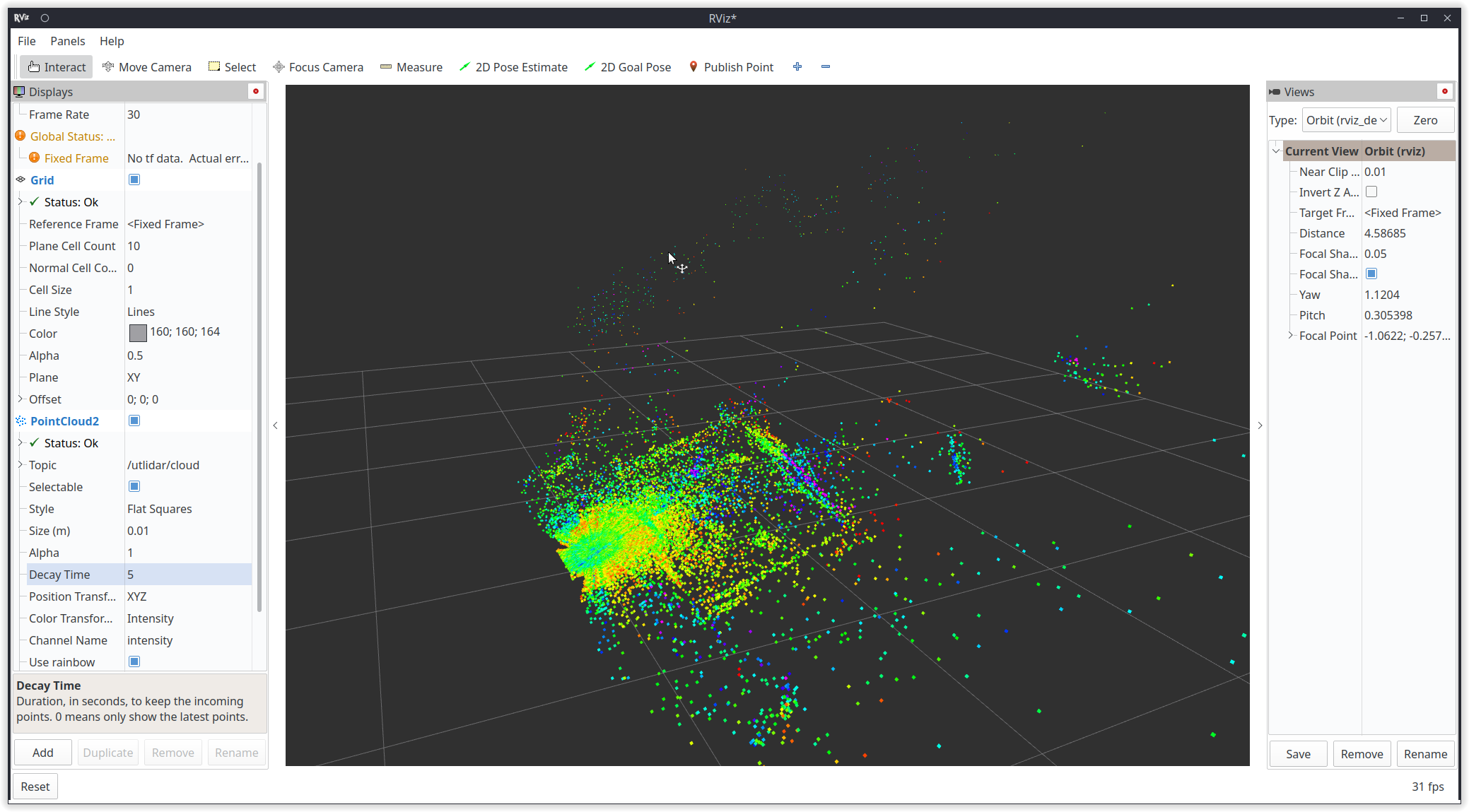
## Rviz
我们也可以使用 rviz 来可视化 Unitree 机器人数据。以下是一个可视化机器人激光雷达数据的示例:
首先,列出所有主题:
```
ros2 topic list
```
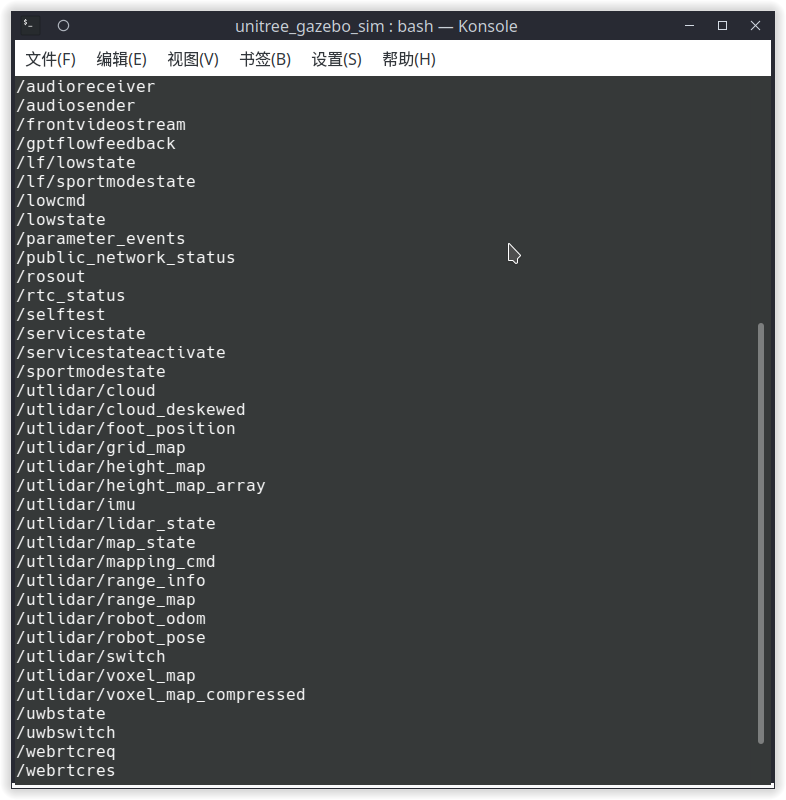
我们可以找到激光雷达的主题:
```
utlidar/cloud
```
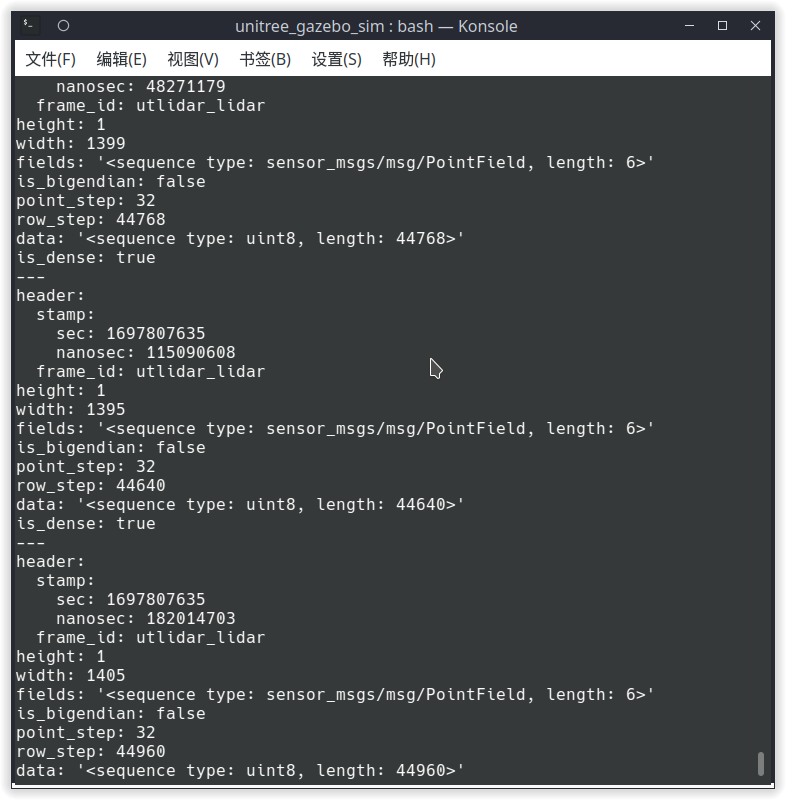
然后,打印激光雷达的 frame_id:
```
ros2 topic echo --no-arr /utlidar/cloud
```
其中 frame_id: utlidar_lidar
最后,运行 rviz:
```
ros2 run rviz2 rviz2
```
在 rviz2 中添加 Pointcloud 主题:utlidar/cloud,并将 Fixed frame 修改为 utlidar_lidar。然后,激光雷达数据将在 rviz2 中显示。
标签:B2, CyclonedDS, DDS, Docker 开发环境, GitHub Codespace, Go2, H1, rmw-cyclonedds-cpp, ROS2, ROS2 安装, Unitree 机器人, VSCode Dev Container, 机器人 SDK, 机器人开发, 机器人控制, 机器人消息接口, 机器人系统需求, 机器人通信, 编译脚本