floschl/pysamosa
GitHub: floschl/pysamosa
PySAMOSA 是一个开源的 Python 框架,用于处理 SAR 卫星测高波形,以测量海洋和内陆水域的海面参数。
Stars: 39 | Forks: 9
# PySAMOSA



[](https://zenodo.org/badge/latestdoi/646028227)
[](https://www.gnu.org/licenses/lgpl-3.0)
![]()  PySAMOSA 是一个基于 Python 的软件,用于处理来自 SAR 卫星测高的开洋和沿海波形,以测量海洋和内陆水域的海面高度、波浪高度和风速。
卫星测高是一种用于对地观测的星载遥感技术。关于卫星测高法的更多细节,请参见[此处](https://www.altimetry.info/file/Radar_Altimetry_Tutorial.pdf)。
从反射回波/波形中提取三个地球物理参数的过程称为重跟踪。测量的(含噪)波形将与开洋功率回波波形模型 SAMOSA2 [1, 2] 进行拟合。
在沿海区域,回波会受到来自强反射目标(如沙洲和泥滩、潮滩、船舶平台、隐蔽的海湾或靠近海岸线的平静水域)的虚假信号的影响。
支持以下欧洲航天局(ESA)卫星测高任务:
- Sentinel-3 (S3)
- Sentinel-6 Michael Freilich (S6-MF)
该软件对波形(即 1 级 (L1b) 数据)进行重跟踪,以提取重跟踪变量 SWH、range 和 Pu。
使用了来自官方 EUMETSAT 基线的开洋重跟踪器实现规范文档(S3 [1],S6-MF [2])。
为了对沿海波形进行重跟踪,实现了以下重跟踪器:
- SAMOSA+ [3]
- CORAL [4, 5]
此外,可以使用 SAMOSA2 模型的零多普勒波束和由 ESA L2 GPP 项目 [7] 创建的专门调整的 $\alpha_p$ LUT 表,对 FF-SAR 处理的 S6-MF 数据进行重跟踪。FF-SAR 处理数据的应用已在 [5] 中得到验证。
未验证(实验性)功能:
## 入门指南
### 使用方法
将 pysamosa 安装到你的环境中
```
$ pip install pysamosa
```
这是一个用于重跟踪来自 S6-MF 任务的单个 L1b 文件的示例
```
from pathlib import Path
import numpy as np
from pysamosa.common_types import L1bSourceType
from pysamosa.data_access import data_vars_s3, data_vars_s6
from pysamosa.retracker_processor import RetrackerProcessor
from pysamosa.settings_manager import get_default_base_settings, SettingsPreset
l1b_files = []
# l1b_files.append(Path('S6A_P4_1B_HR______20211120T051224_20211120T060836_20220430T212619_3372_038_018_009_EUM__REP_NT_F06.nc'))
l1b_files.append(Path.cwd().parent / '.data' / 's6' / 'l1b' / 'S6A_P4_1B_HR______20211120T051224_20211120T060836_20220430T212619_3372_038_018_009_EUM__REP_NT_F06.nc')
l1b_src_type = L1bSourceType.EUM_S6_F06
data_vars = data_vars_s6
# 配置 coastal CORAL retracker
pres = SettingsPreset.CORALv2
rp_sets, retrack_sets, fitting_sets, wf_sets, sensor_sets = get_default_base_settings(settings_preset=pres, l1b_src_type=l1b_src_type)
rp_sets.nc_dest_dir = l1b_files[0].parent / 'processed'
rp_sets.n_offset = 0
rp_sets.n_inds = 0 #0 means all
rp_sets.n_procs = 6 #use 6 cores in parallel
rp_sets.skip_if_exists = False
additional_nc_attrs = {
'L1B source type': l1b_src_type.value.upper(),
'Retracker preset': pres.value.upper(),
}
rp = RetrackerProcessor(l1b_source=l1b_files, l1b_data_vars=data_vars['l1b'],
rp_sets=rp_sets,
retrack_sets=retrack_sets,
fitting_sets=fitting_sets,
wf_sets=wf_sets,
sensor_sets=sensor_sets,
nc_attrs_kw=additional_nc_attrs,
bbox=[np.array([-29.05, -29.00, 0, 360])],
)
rp.process() #start processing
print(rp.output_l2) #retracked L2 output can be found in here
```
一个运行的重跟踪最小工作示例在 `notebooks/retracking_example.ipynb` 中展示。
### 开发
强烈建议使用合适的 Python IDE,例如
[PyCharm Community](https://www.jetbrainscom/pycharm/download/) 或 Visual Studio Code。
使用 IDE 将使你能够更好地熟悉代码、调试和扩展它。
克隆仓库
```
$ git clone {repo_url}
```
进入克隆的目录
```
$ cd pysamosa
```
将依赖项安装到你的 conda 环境/虚拟环境中
```
$ pip install -r requirements.txt
```
通过运行 cython 编译 .pyx 文件(例如 model_helpers.pyx)来构建扩展
对于 Windows 用户:安装时可能需要已安装的 C/C++ 编译器,例如 MSCV,它随免费的 [Visual Studio Community](https://visualstudio.microsoft.com/vs/community/) 提供
```
$ python setup.py build_ext --inplace
```
可选:在 HPC 集群上编译(通常不需要)
```
$ LDSHARED="icc -shared" CC=icc python setup.py build_ext --inplace
```
## 技巧
以下列表提供了软件推荐用法的简要说明。
1. **使用 Jupyter Notebook 入门**
`notebooks/retracking_example.ipynb` 包含一个示例脚本,展示如何重跟踪一个 EUMETSAT 基线 L1b 样本文件。
重跟踪得到的 SWH 和 SWH 数据与 EUMETSAT 基线 L2 数据进行了比较。`notebooks/demo_script.py` 提供了上面的代码示例,以便快速启动一个小型重跟踪示例。
2. **更多入口点**
文件 `main_s3.py`、`main_s6.py`、`main_cs.py`、(`main_*.py`)等是批量处理多个 nc 文件的入口点。
读取一个 L1b 文件列表(或单个文件)进行重跟踪,这些文件可以是完全重跟踪,也可以基于给定的边界框(bbox)参数。每个处理过的 L1b 文件会输出一个重跟踪后的 L2 文件。
3. **设置**
`RetrackerProcessor` 的输入要求在初始化期间插入 `RetrackerProcessorSettings`、`RetrackerSettings`、`FittingSettings`、`WaveformSettings` 和 `SensorSettings` 对象。这些设置对象的默认值可以通过 `get_default_base_settings` 函数,基于 `L1bSourceType` 和 `SettingsPreset` 这两个设置来获取。
例如,以下代码片段取自 `main_s3.py` 文件,它使用默认的基于 SAMOSA 的开洋重跟踪器(无 SettingsPreset)重跟踪 Sentinel-3 数据(从测量索引 25800 开始的 100 个波形,使用 6 个核心)。
```
l1b_src_type = L1bSourceType.EUM_S3
pres = SettingsPreset.NONE #use this for the standard SAMOSA-based retracker [2]
# pres = SettingsPreset.CORALv2 #use this for CORALv2 [5]
# pres = SettingsPreset.NONE #use this for SAMOSA+ [3]
rp_sets, retrack_sets, fitting_sets, wf_sets, sensor_sets = get_default_base_settings(settings_preset=pres, l1b_src_type=l1b_src_type)
rp_sets.nc_dest_dir = nc_dest_path / run_name
rp_sets.n_offset = 25800
rp_sets.n_inds = 100
rp_sets.n_procs = 6
rp_sets.skip_if_exists = False
```
4. **评估环境**
`./pysamosa/tests/` 目录下有多个单元测试,旨在更详细地分析重跟踪输出。
最重要的测试脚本是 `test_retrack_multi.py`,它包括对 S3A、S6、CS2 任务的短沿轨段进行重跟踪(以及一个通用的输入 nc 文件)。
`test_retrack_single` 允许你检查单个波形的重跟踪结果,并将其与参考重跟踪结果进行比较。
请取消文件 `conftest.py` 中 `mpl.use('TkAgg')` 这行的注释,以绘制测试输出,这对于文件 `tests/test_retrack_multi.py` 和 `tests/test_retrack_multi.py` 中的重跟踪测试特别有用。
5. **CORALv1 和 CORALv2 的区别**
- v2 有两个额外的扩展,这是 S6-MF 所需要的。
- `retrack_sets.interference_masking_mask_before_le = True`
前缘之前的干扰信号也会被自适应干扰抑制方案(AIM,CORAL 特性)屏蔽掉。
- `fitting_sets.Fit_Var_2_MinMax_Hs = (0.0, 20)`
拟合过程的 SWH 下界设置为 0.0,如 [2] 中所定义。
6. **质量标志**
在重跟踪过程中,质量标志变量 `swh_qual` 和 `range_qual`(后者只是前者的副本)是重跟踪输出的一部分,表示每个单独波形的重跟踪质量(0=好,1=差)。
这在沿海场景中尤其重要,因为那里的波形会受到虚假信号的影响,这些信号往往导致波形重跟踪错误。CORAL 沿海重跟踪器最大化了沿海区域的有效记录数。
因此,我们强调在重跟踪产品中考虑 `swh_qual`/`range_qual` 质量标志的重要性。
## 验证
### 运行测试
要运行所有单元测试(使用 pytest 框架),请执行
```
$ pytest
```
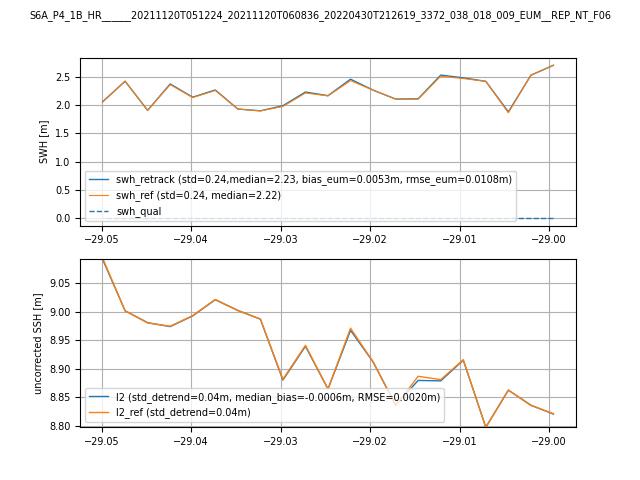
### 与 EUMETSAT L2 基线数据比较
将 S3 和 S6-MF 任务的一个开洋段的重跟踪结果与 EUMETSAT L2 基线(S3: 004, S6-MF: F06)进行比较
(由 `notebooks/retracking_example.ipynb` Jupyter notebook 生成)
S3 | S6-MF
:-:|:-:
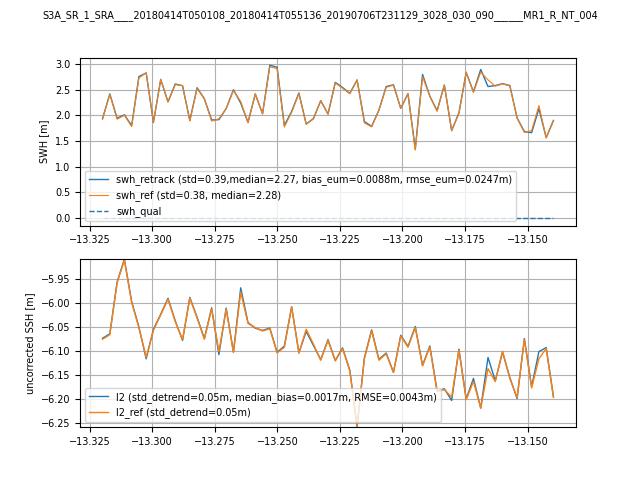 | 
## 贡献
- 复刻此仓库
- 提交拉取请求以合并回此仓库。
在提交更改之前,请确保你的更改能通过 flake8、black、isort 以及测试,包括使用 tox 测试其他 Python 版本:
```
$ flake8 pysamosa tests scripts
$ black . --check --diff
$ isort . --check-only --diff
$ pytest
$ tox
```
如果你的拉取请求被接受,你将被包含在下一个正式发布版本中,并将被列为 Zenodo 创建的 DOI 链接的共同作者。
## 未来工作
本项目可能的发展方向:
与重跟踪相关
- 使 CS-2 重跟踪与 CS-2 基线处理链对齐,并根据 [ESA Cryo-TEMPO 项目](https://earth.esa.int/eogateway/documents/20142/37627/Cryo-TEMPO-ATBD-Coastal-Oceans.pdf) 开发的 [SAMpy](https://github.com/cls-obsnadir-dev/SAMPy) 进行验证
- 实现 EUMETSAT 基线处理链的演进版本 [6],例如计划于 2023 年第三季度进行的数值重跟踪
与软件相关
- 创建用于沿海重跟踪演示的 notebook
- 创建更丰富的文档(readthedocs)
## 引用
如果你使用此软件或代码,请引用此 DOI:
Florian Schlembach; Marcello Passaro. PySAMOSA: An Open-source Software Framework for Retracking SAMOSA-based, Open Ocean and Coastal Waveforms of SAR Satellite Altimetry. Zenodo. https://zenodo.org/badge/latestdoi/646028227.
## 致谢
作者感谢
此软件包使用 [Cookiecutter](https://github.com/audreyr/cookiecutter) 和 [audreyr/cookiecutter-pypackage](https://github.com/audreyr/cookiecutter-pypackage) 项目模板创建。
## 参考文献
[1] SAMOSA Detailed Processing Model: Christine Gommenginger, Cristina Martin-Puig, Meric Srokosz, Marco Caparrini, Salvatore Dinardo, Bruno Lucas, Marco Restano, Américo, Ambrózio and Jérôme Benveniste, Detailed Processing Model of the Sentinel-3 SRAL SAR altimeter ocean waveform retracker, Version 2.5.2, 31 October 2017, Under ESA-ESRIN Contract No. 20698/07/I-LG (SAMOSA), Restricted access as defined in the Contract, Jérôme Benveniste (Jerome.Benvensite@esa.int) pers. comm.
[2] EUMETSAT. Sentinel-6/Jason-CS ALT Level 2 Product Generation Specification (L2 ALT PGS), Version V4D; 2022. https://www.eumetsat.int/media/48266.
[3] Dinardo, Salvatore. ‘Techniques and Applications for Satellite SAR Altimetry over Water, Land and Ice’. Dissertation, Technische Universität, 2020. https://tuprints.ulb.tu-darmstadt.de/11343/.
[4] Schlembach, F.; Passaro, M.; Dettmering, D.; Bidlot, J.; Seitz, F. Interference-Sensitive Coastal SAR Altimetry Retracking Strategy for Measuring Significant Wave Height. Remote Sensing of Environment 2022, 274, 112968. https://doi.org/10.1016/j.rse.2022.112968.
[5] Schlembach, F.; Ehlers, F.; Kleinherenbrink, M.; Passaro, M.; Dettmering, D.; Seitz, F.; Slobbe, C. Benefits of Fully Focused SAR Altimetry to Coastal Wave Height Estimates: A Case Study in the North Sea. Remote Sensing of Environment 2023, 289, 113517. https://doi.org/10.1016/j.rse.2023.113517.
[6] Scharroo, R.; Martin-Puig, C.; Meloni, M.; Nogueira Loddo, C.; Grant, M.; Lucas, B. Sentinel-6 Products Status. Ocean Surface Topography Science Team (OSTST) meeting in Venice 2022. https://doi.org/10.24400/527896/a03-2022.3671.
[7] ESA L2 GPP Project: FF-SAR SAMOSA LUT generation was funded under ESA contract 4000118128/16/NL/AI.
PySAMOSA 是一个基于 Python 的软件,用于处理来自 SAR 卫星测高的开洋和沿海波形,以测量海洋和内陆水域的海面高度、波浪高度和风速。
卫星测高是一种用于对地观测的星载遥感技术。关于卫星测高法的更多细节,请参见[此处](https://www.altimetry.info/file/Radar_Altimetry_Tutorial.pdf)。
从反射回波/波形中提取三个地球物理参数的过程称为重跟踪。测量的(含噪)波形将与开洋功率回波波形模型 SAMOSA2 [1, 2] 进行拟合。
在沿海区域,回波会受到来自强反射目标(如沙洲和泥滩、潮滩、船舶平台、隐蔽的海湾或靠近海岸线的平静水域)的虚假信号的影响。
支持以下欧洲航天局(ESA)卫星测高任务:
- Sentinel-3 (S3)
- Sentinel-6 Michael Freilich (S6-MF)
该软件对波形(即 1 级 (L1b) 数据)进行重跟踪,以提取重跟踪变量 SWH、range 和 Pu。
使用了来自官方 EUMETSAT 基线的开洋重跟踪器实现规范文档(S3 [1],S6-MF [2])。
为了对沿海波形进行重跟踪,实现了以下重跟踪器:
- SAMOSA+ [3]
- CORAL [4, 5]
此外,可以使用 SAMOSA2 模型的零多普勒波束和由 ESA L2 GPP 项目 [7] 创建的专门调整的 $\alpha_p$ LUT 表,对 FF-SAR 处理的 S6-MF 数据进行重跟踪。FF-SAR 处理数据的应用已在 [5] 中得到验证。
未验证(实验性)功能:
## 入门指南
### 使用方法
将 pysamosa 安装到你的环境中
```
$ pip install pysamosa
```
这是一个用于重跟踪来自 S6-MF 任务的单个 L1b 文件的示例
```
from pathlib import Path
import numpy as np
from pysamosa.common_types import L1bSourceType
from pysamosa.data_access import data_vars_s3, data_vars_s6
from pysamosa.retracker_processor import RetrackerProcessor
from pysamosa.settings_manager import get_default_base_settings, SettingsPreset
l1b_files = []
# l1b_files.append(Path('S6A_P4_1B_HR______20211120T051224_20211120T060836_20220430T212619_3372_038_018_009_EUM__REP_NT_F06.nc'))
l1b_files.append(Path.cwd().parent / '.data' / 's6' / 'l1b' / 'S6A_P4_1B_HR______20211120T051224_20211120T060836_20220430T212619_3372_038_018_009_EUM__REP_NT_F06.nc')
l1b_src_type = L1bSourceType.EUM_S6_F06
data_vars = data_vars_s6
# 配置 coastal CORAL retracker
pres = SettingsPreset.CORALv2
rp_sets, retrack_sets, fitting_sets, wf_sets, sensor_sets = get_default_base_settings(settings_preset=pres, l1b_src_type=l1b_src_type)
rp_sets.nc_dest_dir = l1b_files[0].parent / 'processed'
rp_sets.n_offset = 0
rp_sets.n_inds = 0 #0 means all
rp_sets.n_procs = 6 #use 6 cores in parallel
rp_sets.skip_if_exists = False
additional_nc_attrs = {
'L1B source type': l1b_src_type.value.upper(),
'Retracker preset': pres.value.upper(),
}
rp = RetrackerProcessor(l1b_source=l1b_files, l1b_data_vars=data_vars['l1b'],
rp_sets=rp_sets,
retrack_sets=retrack_sets,
fitting_sets=fitting_sets,
wf_sets=wf_sets,
sensor_sets=sensor_sets,
nc_attrs_kw=additional_nc_attrs,
bbox=[np.array([-29.05, -29.00, 0, 360])],
)
rp.process() #start processing
print(rp.output_l2) #retracked L2 output can be found in here
```
一个运行的重跟踪最小工作示例在 `notebooks/retracking_example.ipynb` 中展示。
### 开发
强烈建议使用合适的 Python IDE,例如
[PyCharm Community](https://www.jetbrainscom/pycharm/download/) 或 Visual Studio Code。
使用 IDE 将使你能够更好地熟悉代码、调试和扩展它。
克隆仓库
```
$ git clone {repo_url}
```
进入克隆的目录
```
$ cd pysamosa
```
将依赖项安装到你的 conda 环境/虚拟环境中
```
$ pip install -r requirements.txt
```
通过运行 cython 编译 .pyx 文件(例如 model_helpers.pyx)来构建扩展
对于 Windows 用户:安装时可能需要已安装的 C/C++ 编译器,例如 MSCV,它随免费的 [Visual Studio Community](https://visualstudio.microsoft.com/vs/community/) 提供
```
$ python setup.py build_ext --inplace
```
可选:在 HPC 集群上编译(通常不需要)
```
$ LDSHARED="icc -shared" CC=icc python setup.py build_ext --inplace
```
## 技巧
以下列表提供了软件推荐用法的简要说明。
1. **使用 Jupyter Notebook 入门**
`notebooks/retracking_example.ipynb` 包含一个示例脚本,展示如何重跟踪一个 EUMETSAT 基线 L1b 样本文件。
重跟踪得到的 SWH 和 SWH 数据与 EUMETSAT 基线 L2 数据进行了比较。`notebooks/demo_script.py` 提供了上面的代码示例,以便快速启动一个小型重跟踪示例。
2. **更多入口点**
文件 `main_s3.py`、`main_s6.py`、`main_cs.py`、(`main_*.py`)等是批量处理多个 nc 文件的入口点。
读取一个 L1b 文件列表(或单个文件)进行重跟踪,这些文件可以是完全重跟踪,也可以基于给定的边界框(bbox)参数。每个处理过的 L1b 文件会输出一个重跟踪后的 L2 文件。
3. **设置**
`RetrackerProcessor` 的输入要求在初始化期间插入 `RetrackerProcessorSettings`、`RetrackerSettings`、`FittingSettings`、`WaveformSettings` 和 `SensorSettings` 对象。这些设置对象的默认值可以通过 `get_default_base_settings` 函数,基于 `L1bSourceType` 和 `SettingsPreset` 这两个设置来获取。
例如,以下代码片段取自 `main_s3.py` 文件,它使用默认的基于 SAMOSA 的开洋重跟踪器(无 SettingsPreset)重跟踪 Sentinel-3 数据(从测量索引 25800 开始的 100 个波形,使用 6 个核心)。
```
l1b_src_type = L1bSourceType.EUM_S3
pres = SettingsPreset.NONE #use this for the standard SAMOSA-based retracker [2]
# pres = SettingsPreset.CORALv2 #use this for CORALv2 [5]
# pres = SettingsPreset.NONE #use this for SAMOSA+ [3]
rp_sets, retrack_sets, fitting_sets, wf_sets, sensor_sets = get_default_base_settings(settings_preset=pres, l1b_src_type=l1b_src_type)
rp_sets.nc_dest_dir = nc_dest_path / run_name
rp_sets.n_offset = 25800
rp_sets.n_inds = 100
rp_sets.n_procs = 6
rp_sets.skip_if_exists = False
```
4. **评估环境**
`./pysamosa/tests/` 目录下有多个单元测试,旨在更详细地分析重跟踪输出。
最重要的测试脚本是 `test_retrack_multi.py`,它包括对 S3A、S6、CS2 任务的短沿轨段进行重跟踪(以及一个通用的输入 nc 文件)。
`test_retrack_single` 允许你检查单个波形的重跟踪结果,并将其与参考重跟踪结果进行比较。
请取消文件 `conftest.py` 中 `mpl.use('TkAgg')` 这行的注释,以绘制测试输出,这对于文件 `tests/test_retrack_multi.py` 和 `tests/test_retrack_multi.py` 中的重跟踪测试特别有用。
5. **CORALv1 和 CORALv2 的区别**
- v2 有两个额外的扩展,这是 S6-MF 所需要的。
- `retrack_sets.interference_masking_mask_before_le = True`
前缘之前的干扰信号也会被自适应干扰抑制方案(AIM,CORAL 特性)屏蔽掉。
- `fitting_sets.Fit_Var_2_MinMax_Hs = (0.0, 20)`
拟合过程的 SWH 下界设置为 0.0,如 [2] 中所定义。
6. **质量标志**
在重跟踪过程中,质量标志变量 `swh_qual` 和 `range_qual`(后者只是前者的副本)是重跟踪输出的一部分,表示每个单独波形的重跟踪质量(0=好,1=差)。
这在沿海场景中尤其重要,因为那里的波形会受到虚假信号的影响,这些信号往往导致波形重跟踪错误。CORAL 沿海重跟踪器最大化了沿海区域的有效记录数。
因此,我们强调在重跟踪产品中考虑 `swh_qual`/`range_qual` 质量标志的重要性。
## 验证
### 运行测试
要运行所有单元测试(使用 pytest 框架),请执行
```
$ pytest
```
### 与 EUMETSAT L2 基线数据比较
将 S3 和 S6-MF 任务的一个开洋段的重跟踪结果与 EUMETSAT L2 基线(S3: 004, S6-MF: F06)进行比较
(由 `notebooks/retracking_example.ipynb` Jupyter notebook 生成)
S3 | S6-MF
:-:|:-:
 | 
## 贡献
- 复刻此仓库
- 提交拉取请求以合并回此仓库。
在提交更改之前,请确保你的更改能通过 flake8、black、isort 以及测试,包括使用 tox 测试其他 Python 版本:
```
$ flake8 pysamosa tests scripts
$ black . --check --diff
$ isort . --check-only --diff
$ pytest
$ tox
```
如果你的拉取请求被接受,你将被包含在下一个正式发布版本中,并将被列为 Zenodo 创建的 DOI 链接的共同作者。
## 未来工作
本项目可能的发展方向:
与重跟踪相关
- 使 CS-2 重跟踪与 CS-2 基线处理链对齐,并根据 [ESA Cryo-TEMPO 项目](https://earth.esa.int/eogateway/documents/20142/37627/Cryo-TEMPO-ATBD-Coastal-Oceans.pdf) 开发的 [SAMpy](https://github.com/cls-obsnadir-dev/SAMPy) 进行验证
- 实现 EUMETSAT 基线处理链的演进版本 [6],例如计划于 2023 年第三季度进行的数值重跟踪
与软件相关
- 创建用于沿海重跟踪演示的 notebook
- 创建更丰富的文档(readthedocs)
## 引用
如果你使用此软件或代码,请引用此 DOI:
Florian Schlembach; Marcello Passaro. PySAMOSA: An Open-source Software Framework for Retracking SAMOSA-based, Open Ocean and Coastal Waveforms of SAR Satellite Altimetry. Zenodo. https://zenodo.org/badge/latestdoi/646028227.
## 致谢
作者感谢
此软件包使用 [Cookiecutter](https://github.com/audreyr/cookiecutter) 和 [audreyr/cookiecutter-pypackage](https://github.com/audreyr/cookiecutter-pypackage) 项目模板创建。
## 参考文献
[1] SAMOSA Detailed Processing Model: Christine Gommenginger, Cristina Martin-Puig, Meric Srokosz, Marco Caparrini, Salvatore Dinardo, Bruno Lucas, Marco Restano, Américo, Ambrózio and Jérôme Benveniste, Detailed Processing Model of the Sentinel-3 SRAL SAR altimeter ocean waveform retracker, Version 2.5.2, 31 October 2017, Under ESA-ESRIN Contract No. 20698/07/I-LG (SAMOSA), Restricted access as defined in the Contract, Jérôme Benveniste (Jerome.Benvensite@esa.int) pers. comm.
[2] EUMETSAT. Sentinel-6/Jason-CS ALT Level 2 Product Generation Specification (L2 ALT PGS), Version V4D; 2022. https://www.eumetsat.int/media/48266.
[3] Dinardo, Salvatore. ‘Techniques and Applications for Satellite SAR Altimetry over Water, Land and Ice’. Dissertation, Technische Universität, 2020. https://tuprints.ulb.tu-darmstadt.de/11343/.
[4] Schlembach, F.; Passaro, M.; Dettmering, D.; Bidlot, J.; Seitz, F. Interference-Sensitive Coastal SAR Altimetry Retracking Strategy for Measuring Significant Wave Height. Remote Sensing of Environment 2022, 274, 112968. https://doi.org/10.1016/j.rse.2022.112968.
[5] Schlembach, F.; Ehlers, F.; Kleinherenbrink, M.; Passaro, M.; Dettmering, D.; Seitz, F.; Slobbe, C. Benefits of Fully Focused SAR Altimetry to Coastal Wave Height Estimates: A Case Study in the North Sea. Remote Sensing of Environment 2023, 289, 113517. https://doi.org/10.1016/j.rse.2023.113517.
[6] Scharroo, R.; Martin-Puig, C.; Meloni, M.; Nogueira Loddo, C.; Grant, M.; Lucas, B. Sentinel-6 Products Status. Ocean Surface Topography Science Team (OSTST) meeting in Venice 2022. https://doi.org/10.24400/527896/a03-2022.3671.
[7] ESA L2 GPP Project: FF-SAR SAMOSA LUT generation was funded under ESA contract 4000118128/16/NL/AI.
标签:CORAL算法, ESA任务, Python软件, SAMOSA模型, SAR卫星, Sentinel-3, Sentinel-6, 内陆水体, 卫星数据, 卫星测高, 参数估计, 地球科学, 地球观测, 地理信息, 气候研究, 水文学, 沿海监测, 波形处理, 波高测量, 海洋学, 海洋遥感, 海面高度测量, 环境监测, 空间遥感, 软件框架, 逆向工具, 遥感技术, 重跟踪算法, 风速反演