martinber/vor-python-decoder
GitHub: martinber/vor-python-decoder
从WAV录音文件中解码VOR航空导航信号,通过分析参考信号与可变信号的相位差来计算接收者相对于VOR天线的方位角。
Stars: 50 | Forks: 8
# vor-python-decoder
确定你相对于
[VOR](https://en.wikipedia.org/wiki/VHF_omnidirectional_range) 天线的方位角。你可以
使用 RTL-SDR 和偶极子天线。
使用 Python3, numpy, scipy 和 matplotlib。
经过少量调优,我们能够以小于 3° 的
误差确定我们的方位角。
这是作为一个期末项目匆忙制作的,所以不要指望它是一个可靠的
实时解码器。另一方面,如果你是
numpy/scipy/python 派,我们认为代码非常简单,我们找到的其他替代方案是基于
[GNU-Radio](http://www.housedillon.com/posts/vors-and-sdrs-part-3-supplemental-materials/),
[GNU-Radio](https://www.rtl-sdr.com/using-an-rtl-sdr-to-decode-vor-aircraft-navigation-beacons-in-real-time/)
或
[C](https://www.rtl-sdr.com/an-open-source-vor-receiver-for-airspy-and-rtl-sdr/)
的。
**在 `/docs` 文件夹中有一份西班牙语的报告和演示文稿**
由 Martín Bernardi, Augusto Remedi 和 Ignacio Rittano 制作。
## 注意
你可能需要首先从一个已知位置测量你的方位角,并
将 `ANGLE_OFFSET = 114` 更改为另一个值。一旦你调整了该值,你
应该能得到准确的结果。更多信息请参见
[本节](#filter-delays)。
## 用法
首先确定 VOR 天线的频率并调谐你的 SDR。你应该
使用 AM 解调,并使带宽足够宽,以便两个边带都能
进入滤波器。
你会每隔几秒钟听到一个识别电台的摩尔斯电码和一个
持续的高频嘶嘶声
([示例](https://github.com/martinber/vor-python-decoder/blob/master/samples/293deg_long_1.wav))。
该程序将此解调后的 AM 音频录音作为输入,格式为 WAV
文件:
```
./decoder.py ./recording.wav
```
它将在你的终端上打印出到你位置的方位角。
使用超过 1 秒的录音是没有意义的。在 `/samples`
文件夹中有一些示例,每个文件名都有它们被录制位置的方位角,这是使用地图测量的。
## 工作原理
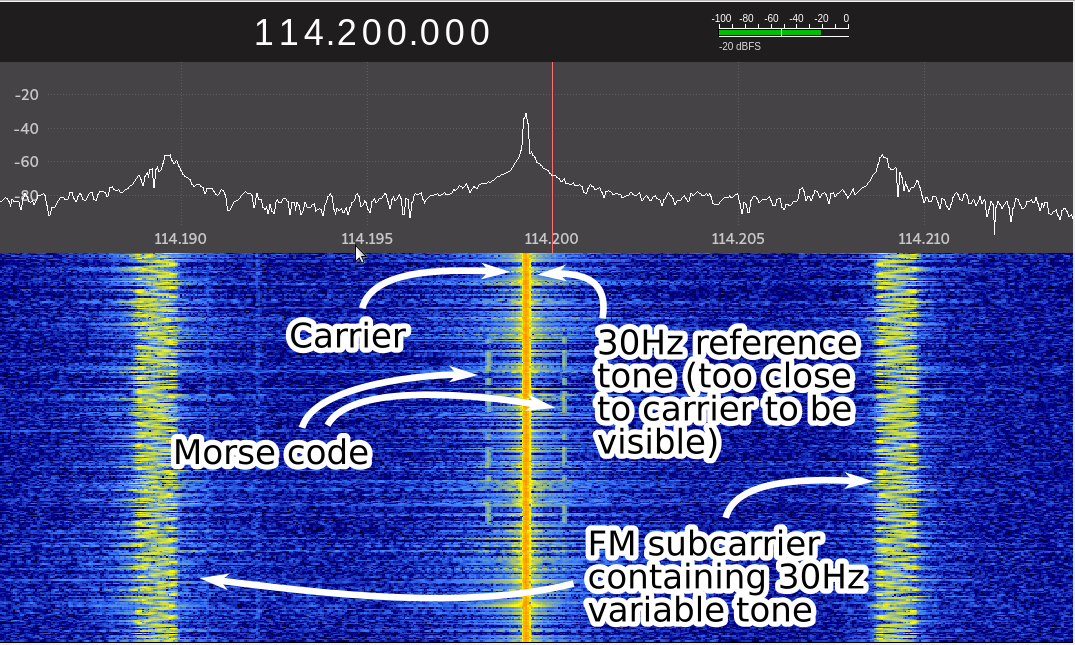
就我们而言,你可以假设发射器发送两个 30Hz
音调,我们将它们命名为 REF(参考)和 VAR(可变)信号。REF 音调
以 AM 调制,连同摩尔斯电码一起。
另一方面,VAR 信号存在于 FM 副载波上。所以你需要
首先解调 AM 载波(获得 REF 和摩尔斯码),然后隔离
FM 副载波进行第二次解调。最终结果是 30Hz VAR
音调。
通过比较 REF 和 VAR 音调之间的相位差,你可以
直接确定你的方位角。
在实践中,事情要困难一些,例如你有 CVOR(常规
VOR)和 DVOR(多普勒 VOR),它们有一些区别。这个程序应该至少适用于 CVOR 信标。
AM 解调已经由 GQRX 或 SDR# 完成,所以这个程序执行的
步骤是:
- 使用截止频率约为 500Hz 的低通滤波器来获取 REF 信号。
- 解调 FM 副载波以获取 VAR 信号。
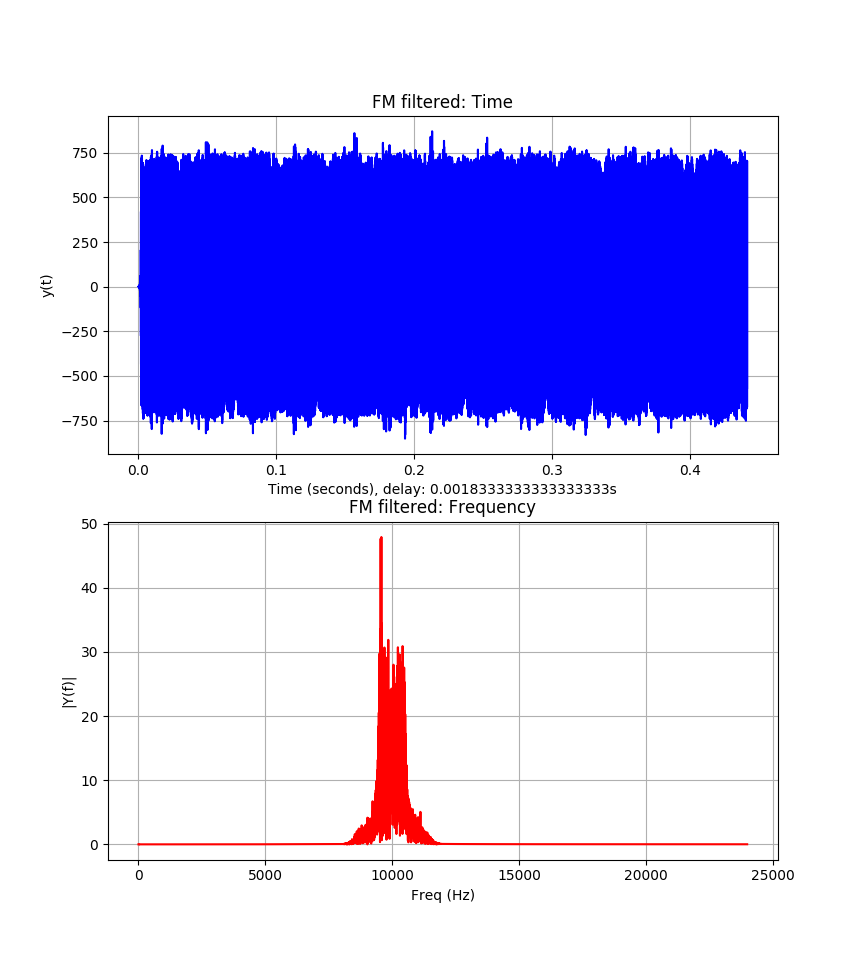
- 首先使用带通滤波器隔离位于 9.96kHz 的 FM 信号。
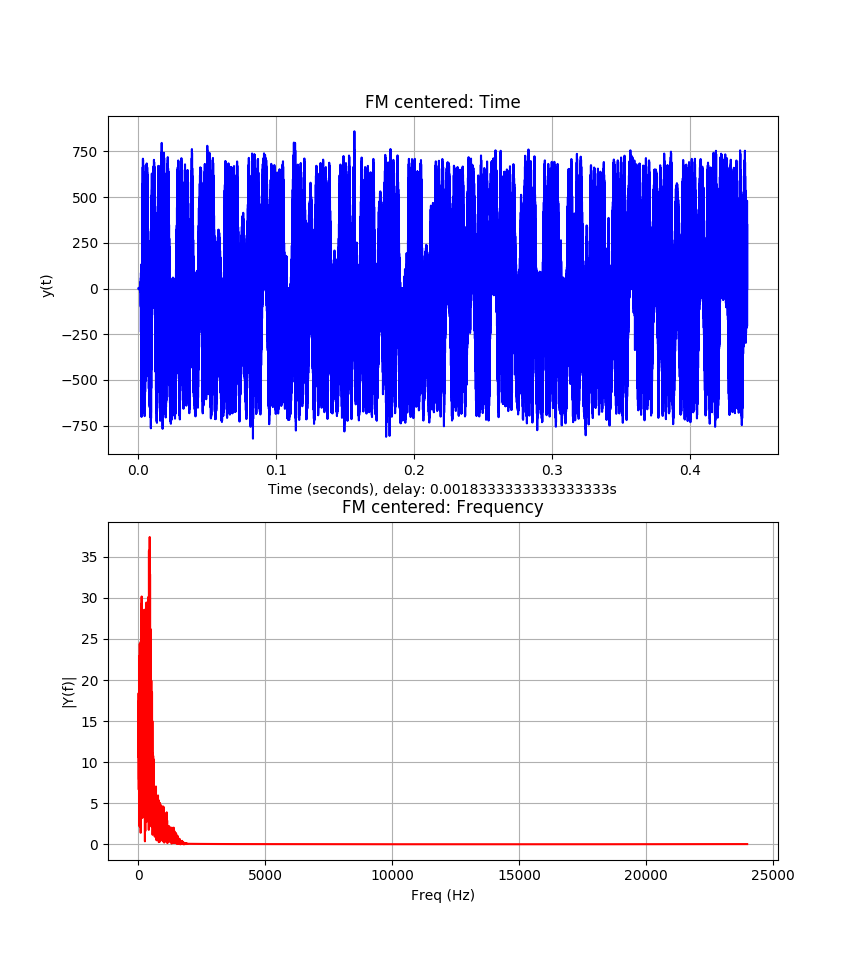
- 与 9.96Hz 复指数相乘,将 FM
信号置于 0Hz 中心。在此步骤期间,我们得到了一个复正交信号。
- FM 解调是通过观察我们在上一步得到的
复信号的角度来进行的。
[更多信息](https://witestlab.poly.edu/blog/capture-and-decode-fm-radio/)
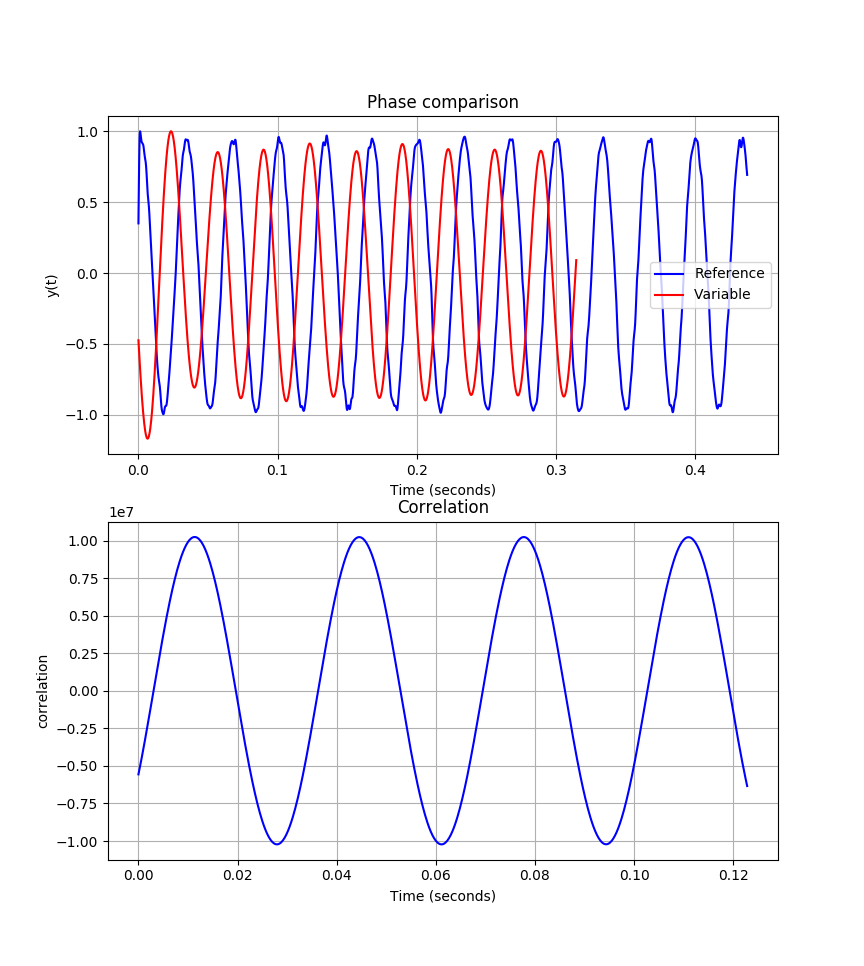
- 对两个信号进行互相关,以确定两者之间的相位
差。相位差就是到你的
位置的方位角。
你可以编辑程序并将 `PLOT_STEPS` 设置为 `True`,以绘制执行的
步骤的频谱。
### 滤波器延迟
在比较两个信号之间的相位差之前,考虑到每个滤波器的延迟是非常
重要的。我们使用了 FIR 滤波器,它
产生 (N-1)/2 的延迟,其中 N 是抽头数。出于这个原因,我们
在一个变量中存储每个滤波器产生的延迟,所以最后,就在
比较之前,我们对齐两个信号。
然而,这个程序有一个问题,在我们的测试中,结果
总是偏离 114°。我们认为问题可能是我们没有考虑到
FM 解调产生的一些延迟。
无论如何,我们只是增加了一个额外的 114° 延迟。这为我们在
所做的每次录音中提供了一致的结果。
## 我们的结果
我们在 [TRC VOR 信标](https://ourairports.com/navaids/TRC/Rio_Cuarto_VOR_AR/) 周围
的不同位置进行了一些简短录音。

[这些点的 KMZ 文件](./docs/vor_tests.kmz)
在确定了前面提到的 114° 值后,每次测量都
在 +/-3° 以内:
- A 点:235.8°,看地图应该在 234° 左右
- B 点:291.6°,看地图应该在 293° 左右
- C 点:178.2°,看地图应该在 177° 左右
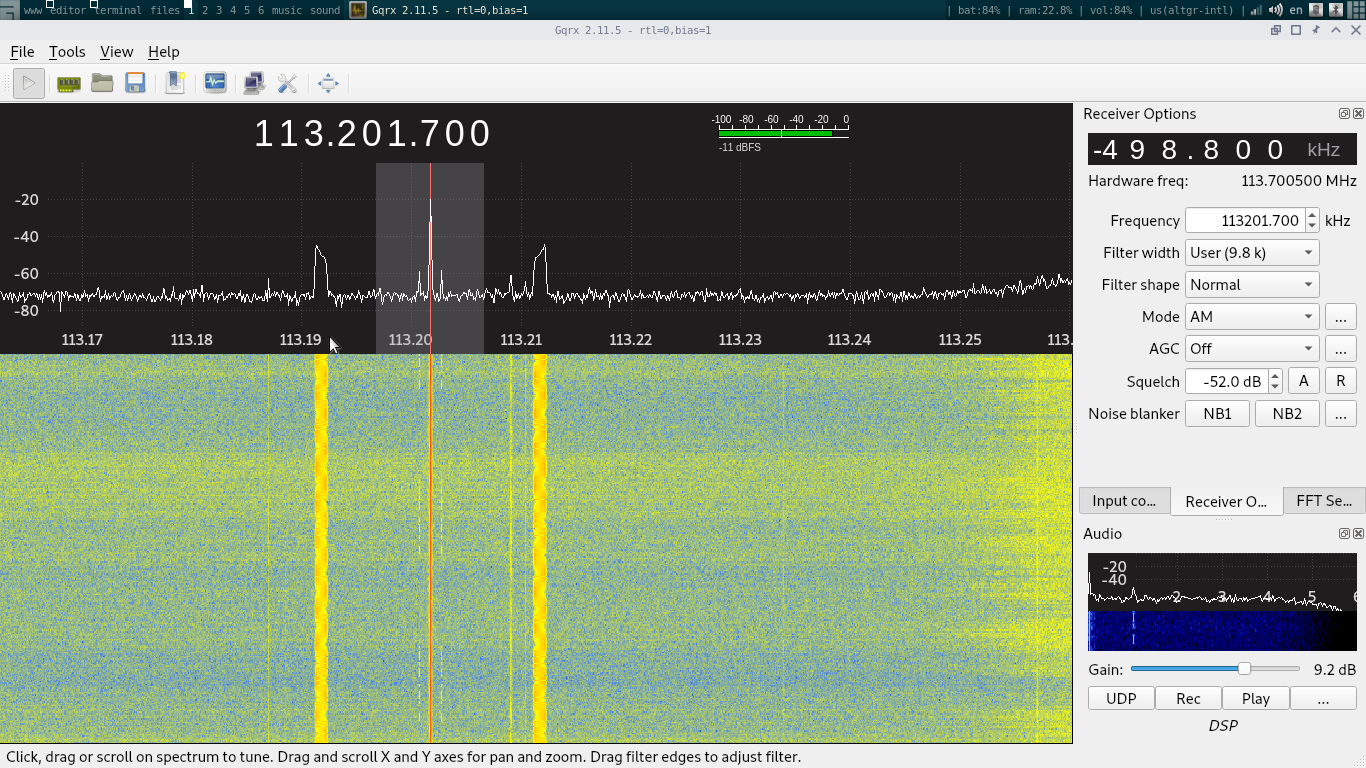
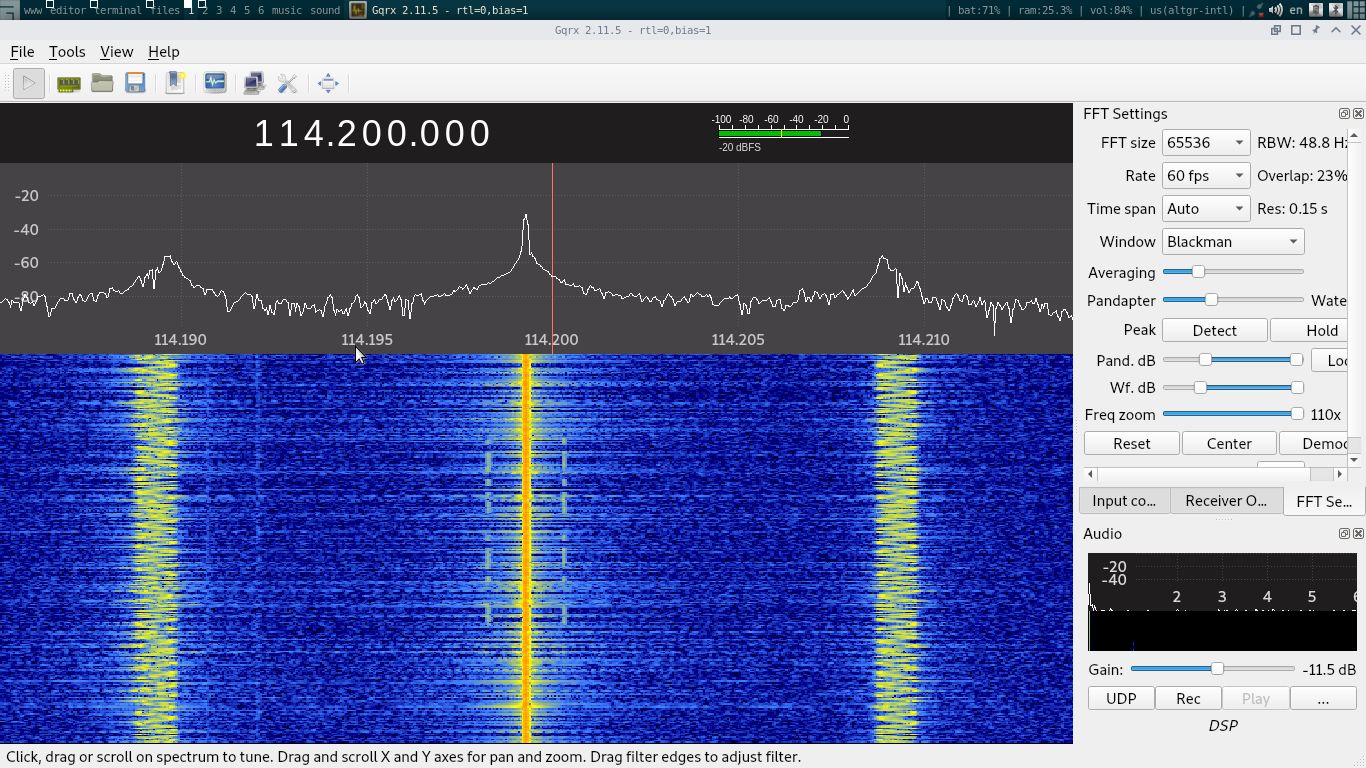
## 截图
使用 GQRX 接收:
WAV 录音(在 GQRX 解调之后):
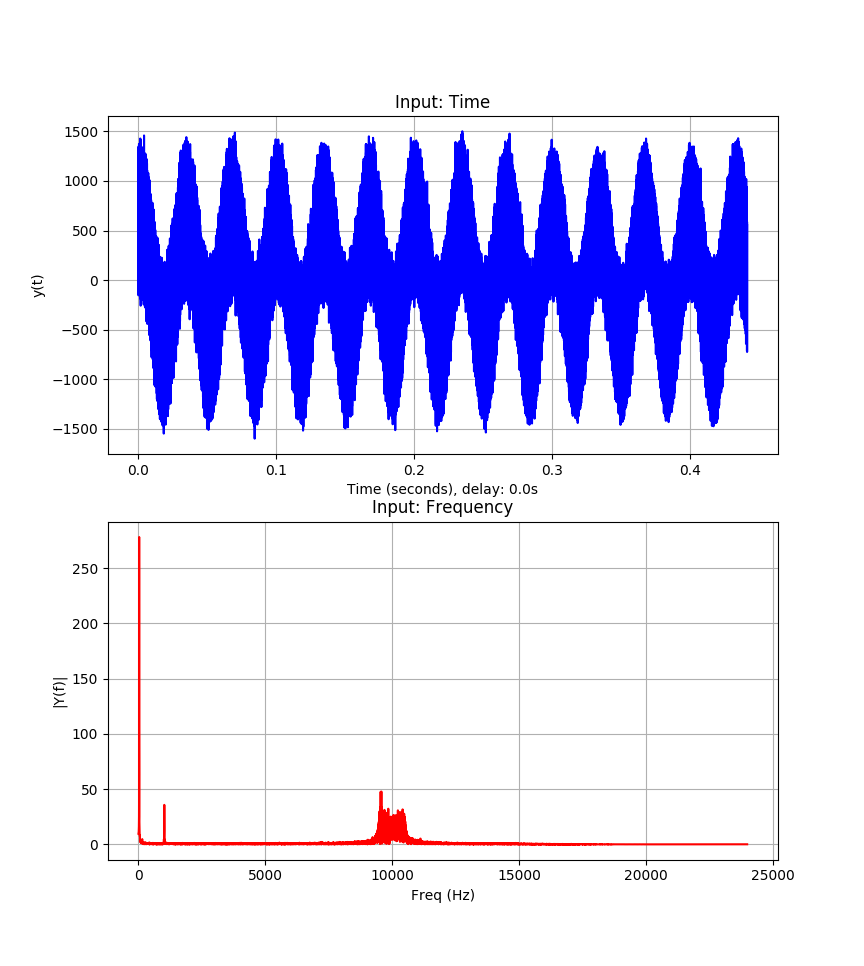
使用带通滤波器隔离 FM 副载波后的信号:
与复指数相乘将 FM 副载波
置于 0Hz 中心后的信号:
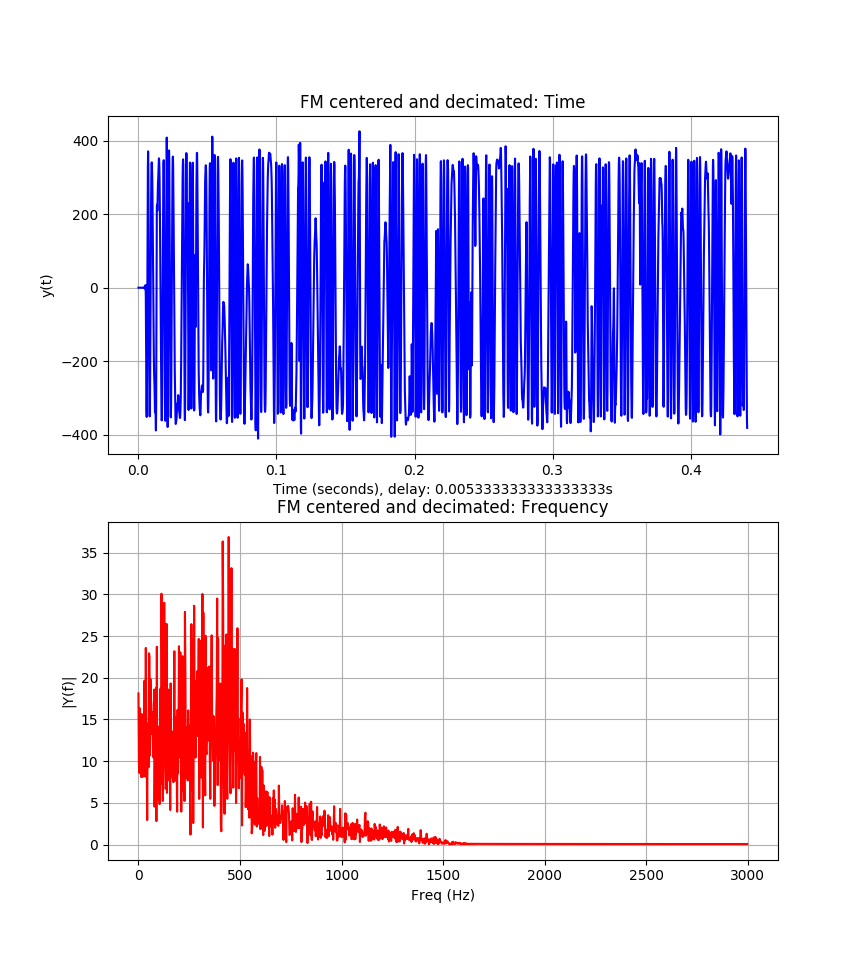
上一步的抽取:
未显示 FM 解调的频谱图像(VAR 信号)或
输入信号上的低通滤波器的频谱(REF 信号)。但你可以在
下图中看到这两个信号,该图比较了两者之间的相位。
标签:AM解调, DSP, Matplotlib, NumPy, Python, RTL-SDR, SciPy, SDR, VHF全向信标, VOR, WAV文件处理, 信号解码, 导航, 数字信号处理, 方位角计算, 无后门, 无线电监测, 航空电子, 软件无线电, 频谱分析