panicAtTheCompile/Risk-Aware-ST-DBSCAN
GitHub: panicAtTheCompile/Risk-Aware-ST-DBSCAN
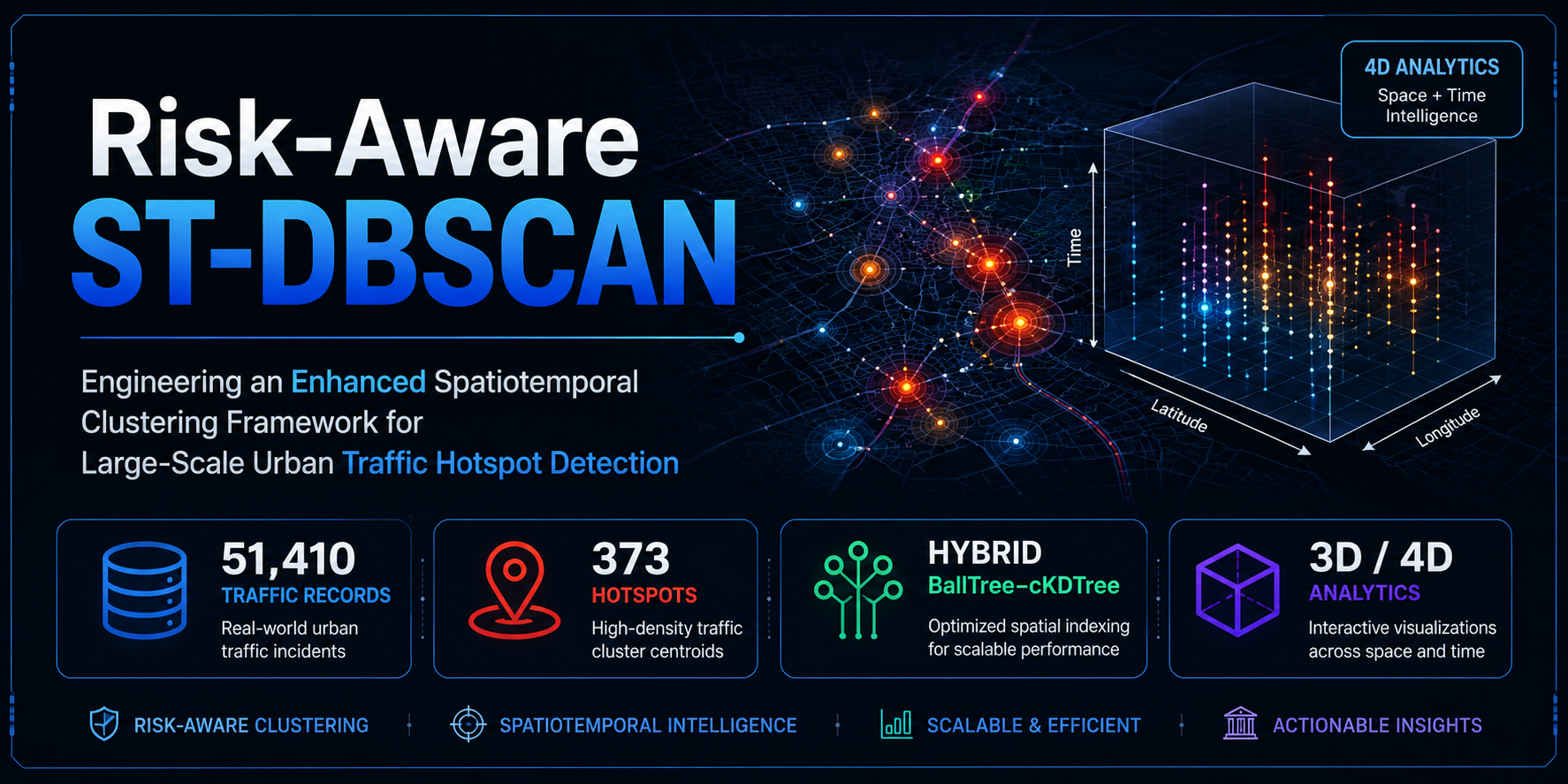
该项目是一个基于增强 ST-DBSCAN 算法的可扩展时空聚类框架,旨在从大规模城市交通事故数据中高效检测并可视化时空热点。
Stars: 0 | Forks: 0




# 风险感知 ST-DBSCAN
/Risk-Aware-STDBSCAN.git
cd Risk-Aware-STDBSCAN
```
安装依赖项。
```
pip install -r requirements.txt
```
# 使用方法
运行 Jupyter notebook 以复现完整的交通热点检测工作流。
```
jupyter notebook notebooks/STDBSCAN_Analysis.ipynb
```
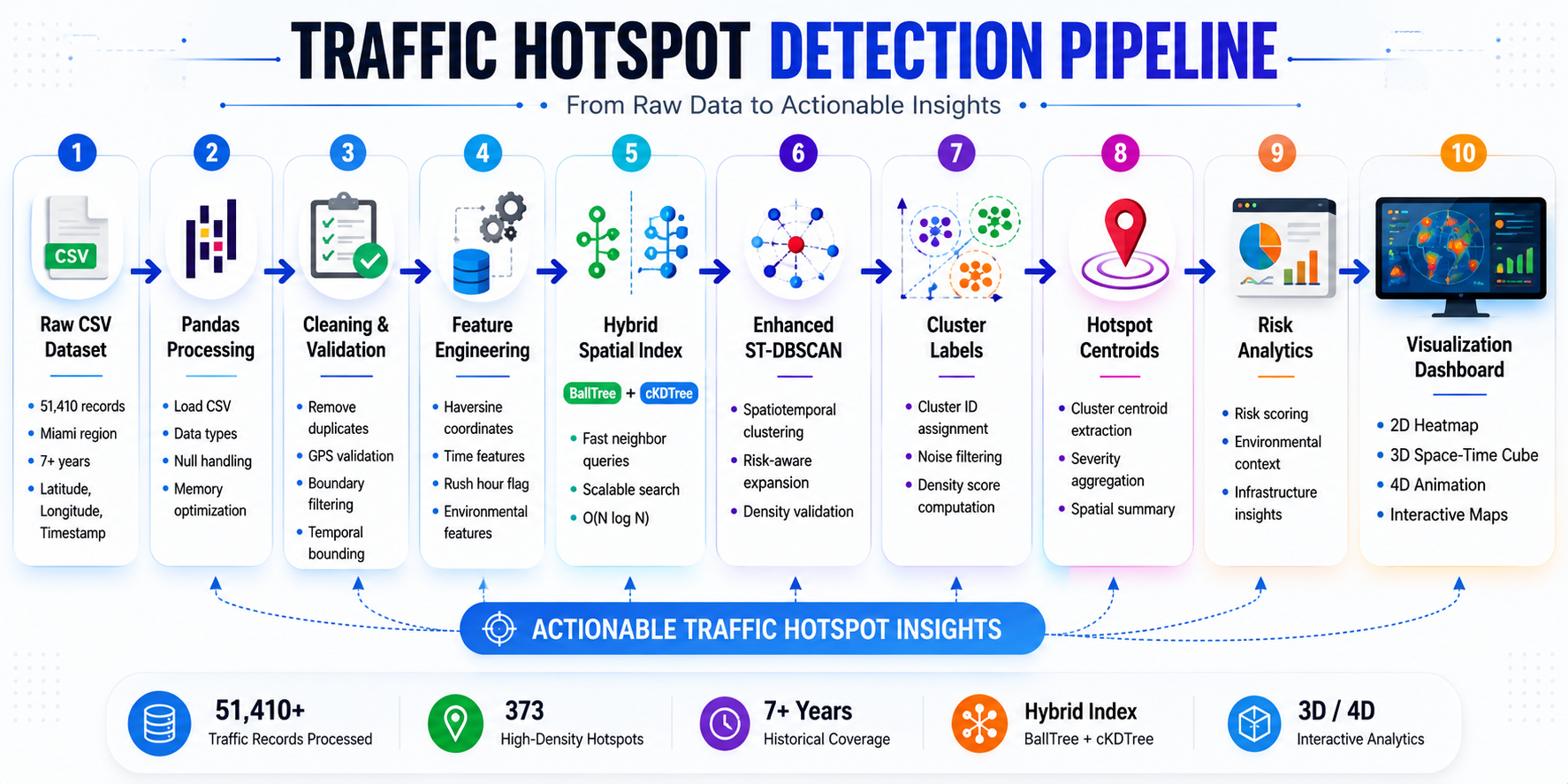
该 notebook 执行以下操作:
* 数据加载
* 数据预处理
* 时间过滤
* GPS 验证
* 特征工程
* 空间索引
* ST-DBSCAN 聚类
* 热点中心生成
* 交互式可视化
# 示例输出
该框架在整个 pipeline 中产生了多个分析输出。
## 空间热点检测
* 交通热点簇
* 簇中心位置
* 基于密度的事故区域
## 交互式地图
* Folium 热点可视化
* 簇中心叠加层
* 基础设施环境信息
## 时空分析
* 3D 时空立方体
* 动画热点演变
* 时间聚类模式
## 工程洞察
* 高风险交通走廊
* 事故集中区域
* 空间基础设施分析
# 性能总结
| 指标 | 值 |
| ------------------ | -------: |
| 交通记录 | **51,410** |
| 热点中心 | **373** |
| 空间索引结构 | **2** |
| 交互式可视化 | **4+** |
| Pipeline 阶段 | **11** |
# 未来改进
当前的实现为时空交通分析建立了一个可复现的框架。
未来的增强功能可能包括:
* 基于深度学习的热点预测
* HDBSCAN 性能对比
* GPU 加速的邻域搜索
* 实时流式交通分析
* 图神经网络集成
* 感知路网的聚类
* 使用 Spark 进行分布式处理
* REST API 部署
* 交互式 Streamlit 仪表板
* Docker 容器化
# 项目目标
本项目旨在展示:
* 地理空间数据工程
* 时空聚类
* 大规模数据预处理
* 高效的空间索引
* 交互式可视化
* 可复现的分析工作流
* 面向工程的机器学习 pipeline
# 参考
1. Birant, D., & Kut, A. (2007). ST-DBSCAN: An algorithm for clustering spatial–temporal data.
2. US Accidents Dataset
3. Scikit-learn Documentation
4. SciPy Spatial Documentation
5. Plotly Documentation
6. Folium Documentation
7. Pandas Documentation
# 致谢
本项目是作为对可扩展地理空间分析的探索而开发的,它将成熟的聚类技术与工程驱动的预处理、空间索引和可视化工作流相结合。
该实现建立在最初的 ST-DBSCAN 方法论之上,同时利用 Python 科学计算生态系统进行了可复现的实验。
# 作者
**Harshita Pulavarti**
GitHub: **https://github.com/**
LinkedIn: **https://linkedin.com/in/**
## 许可证
本项目基于 MIT 许可证发布。
有关更多详细信息,请参阅 **LICENSE** 文件。




标签:NoSQL, Python, ST-DBSCAN, 交通热点检测, 地理空间分析, 无后门, 时空聚类, 逆向工具