QQ767172261/Deep-learning-Yolov8-model-training-drone-mine-engineering-vehicle-detection-data-set-identification
GitHub: QQ767172261/Deep-learning-Yolov8-model-training-drone-mine-engineering-vehicle-detection-data-set-identification
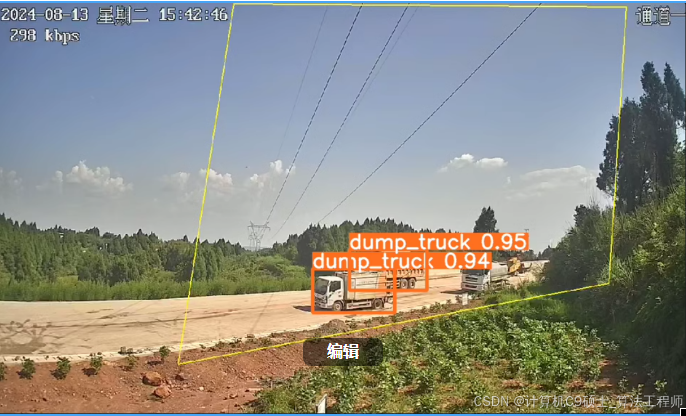
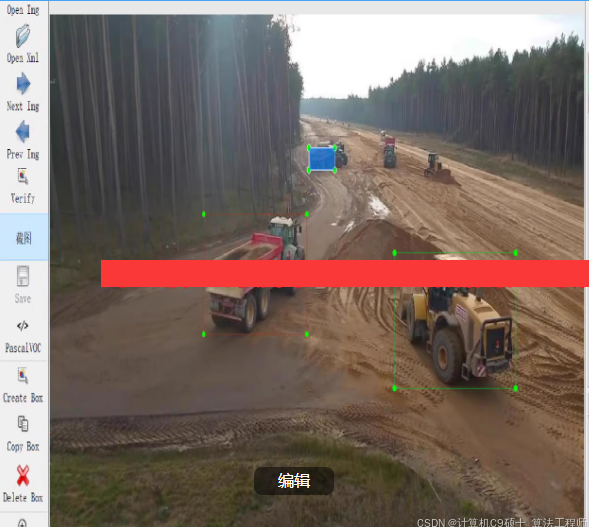
面向无人机矿场巡检场景的工程车辆目标检测数据集,提供10类工程机械共4981张标注图像及完整的YOLOv8训练与部署流程。
Stars: 0 | Forks: 0
深度学习Yolov8模型训练无人机矿场工程车检测数据集 识别检测无人机挖掘机检测数据集 无人机推土机数据集检测 无人机起重机数据集检测等10类
@[toc]

无人机矿场工程车检测数据集 4900张 工程车voc yolo
### 🚜 工程车辆目标检测数据集统计表
| 序号 | 分类名称 | 英文类别名 | 图片张数 | 标注个数 |
|------|--------------------|--------------------------|----------|-----------|
| 1 | 挖掘机 | excavator | 1,086 | 1,356 |
| 2 | 自卸卡车 | dump_truck | 1,074 | 1,816 |
| 3 | 压路机 | compactor | 538 | 583 |
| 4 | 移动式起重机 | mobile_crane | 529 | 589 |
| 5 | 塔式起重机 | tower_crane | 169 | 235 |
| 6 | 轮式装载机 | wheel_loader | 851 | 922 |
| 7 | 混凝土搅拌车 | concrete_mixer_truck | 376 | 427 |
| 8 | 反铲装载机 | backhoe_loader | 666 | 693 |
| 9 | 推土机 | dozer | 492 | 536 |
| 10 | 平地机 | grader | 622 | 641 |
| **总计** | - | - | **4,981**| **7,798** |
矿场工程车检测数据集, **4981张图像**、**7798个标注目标**,共 **10类工程车辆**。构建深度学习目标检测系统(YOLOv8)的完整流程,包括:
## ✅ 一、数据格式说明
数据是 **VOC XML 格式** 和 **YOLO TXT 格式** 的标注文件。
- **VOC XML**:每个图片对应一个 `.xml` 文件,包含边界框和类别信息。
- **YOLO TXT**:每个图片对应一个 `.txt` 文件,每行表示一个目标:`class_id x_center y_center width height`(归一化坐标)。
## ✅ 二、目录结构建议
mining_vehicle_dataset/
├── images/
│ ├── train/
│ ├── val/
│ └── test/
├── labels/
│ ├── train/
│ ├── val/
│ └── test/
└── data.yaml
## ✅ 三、data.yaml 配置文件
train: ./images/train
val: ./images/val
test: ./images/test
nc: 10 # 类别数
names: ['excavator', 'dump_truck', 'compactor', 'mobile_crane', 'tower_crane',
'wheel_loader', 'concrete_mixer_truck', 'backhoe_loader', 'dozer', 'grader']
## ✅ 四、模型训练(以 YOLOv8 为例)
### 1. 安装依赖
pip install ultralytics
### 2. 开始训练
yolo task=detect mode=train model=yolov8s.pt data=data.yaml epochs=100 imgsz=640 batch=16
- `model`: 可选 yolov8n/s/m/l/x
- `epochs`: 训练轮次,建议从100开始
- `imgsz`: 图像尺寸,根据硬件选择(如640或1280)
- `batch`: 批量大小,根据显存调整
## ✅ 五、推理与部署
### 1. 单图推理
from ultralytics import YOLO
# 加载模型
model = YOLO('runs/detect/train/weights/best.pt')
# 推理
results = model('test.jpg')
# 显示结果
for r in results:
im_array = r.plot()
im = Image.fromarray(im_array[..., ::-1]) # RGB PIL图像
im.show()
### 2. 视频推理
def process_video(video_path):
cap = cv2.VideoCapture(video_path)
while cap.isOpened():
ret, frame = cap.read()
if not ret:
break
results = model(frame)
annotated_frame = results[0].plot()
cv2.imshow("Mining Vehicle Detection", annotated_frame)
if cv2.waitKey(1) == ord("q"):
break
cap.release()
cv2.destroyAllWindows()
### 3. 批量推理(文件夹)
yolo task=detect mode=predict model=best.pt source="path/to/images" save=True
## ✅ 六、性能评估
yolo task=detect mode=val model=best.pt data=data.yaml
输出指标:
- mAP@0.5
- mAP@0.5:0.95
- Precision / Recall
- FPS(帧率)
## ✅ 七、可视化工具推荐
- **LabelImg / LabelYOLO**:用于查看标签
- **TensorBoard**:监控训练过程
- **Roboflow Universe**:可上传数据进行增强、格式转换等操作
## ✅ 八、无人机集成建议(矿场巡检)
如果你计划将此模型部署到 **无人机巡检系统中**,可以考虑以下方案:
### 硬件平台:
- NVIDIA Jetson Nano / Xavier NX / Orin Nano
- DJI M30/M30T 无人机 + RTSP 流传输
### 软件架构:
- 实时视频流接收(OpenCV / GStreamer)
- 模型推理(TensorRT优化YOLO)
- 目标识别 + 报警机制(MQTT/WebSocket推送)
## ✅ 九、代码打包建议
使用如下命令将你的项目打包成 Python 包或 Docker 镜像:
### 使用 PyInstaller 打包为可执行程序
pip install pyinstaller
pyinstaller --onefile detect_app.py
### 使用 Docker 构建镜像
FROM python:3.10
WORKDIR /app
COPY . .
RUN pip install -r requirements.txt
CMD ["python", "detect_app.py"]
## ✅ 十、附录:类别分布统计(供参考)
| 类别名 | 图片数量 | 标注数量 |
|---------------------|----------|-----------|
| excavator | 1086 | 1356 |
| dump_truck | 1074 | 1816 |
| compactor | 538 | 583 |
| mobile_crane | 529 | 589 |
| tower_crane | 169 | 235 |
| wheel_loader | 851 | 922 |
| concrete_mixer_truck| 376 | 427 |
| backhoe_loader | 666 | 693 |
| dozer | 492 | 536 |
| grader | 622 | 641 |
| **总计** | **4981** | **7798** |
以上文字及代码仅供参考。
标签:YOLOv8, 工程车检测, 无人机, 机器学习数据集, 深度学习, 漏洞挖掘, 目标检测, 计算机视觉, 请求拦截, 逆向工具