Tariqbaloch786/visionflow
GitHub: Tariqbaloch786/visionflow
VisionFlow 是一套基于 YOLOv8 的实时多目标追踪与交通分析管线,将检测、追踪、测速、计数和热力图整合为一个配置驱动的 Python 工具。
Stars: 0 | Forks: 0
# VisionFlow
一个十字路口的交通摄像头每天能捕捉到成千上万辆汽车。这些录像大多只是静静地躺在硬盘里。VisionFlow 将它们转化为你可以真正加以利用的数据:有多少车驶过、车速有多快、在哪里发生了拥堵。
它可以在任何安装了 Python 并拥有视频文件(或网络摄像头,或 RTSP 流)的地方运行。只需输入一条命令,就能输出带有标注的视频和记录每条轨迹的 CSV 文件。
*真实输出:在一段公开高速公路视频上使用 YOLOv8n + IoU tracker,峰值时同时追踪 8 个 ID,随着车辆驶过,线计数器不断更新。*
## 它的功能
通过一个配置文件将以下四项功能整合在一起:
1. **检测** — YOLOv8 负责挑出每一帧中的目标。
2. **追踪** — 一个基于 IoU 的小型追踪器为每个目标分配一个稳定的 ID,让你可以跨帧追踪它。
3. **分析** — 计数器监控你在图像上绘制的线条,单应性变换将像素转换为米从而得出 km/h 单位的速度,同时热力图会随时间积累动态信息。
4. **输出** — 带标注的视频、CSV 日志、可选的实时预览,以及用于生成图表的 Streamlit 仪表板。
其核心在于,分析模块与数据源是解耦的。同一套代码既能分析高速公路上的汽车,也能分析 Target 超市里的顾客,或是仓库里的叉车——只需更改 YOLO 权重和线条坐标即可。
## 快速一览
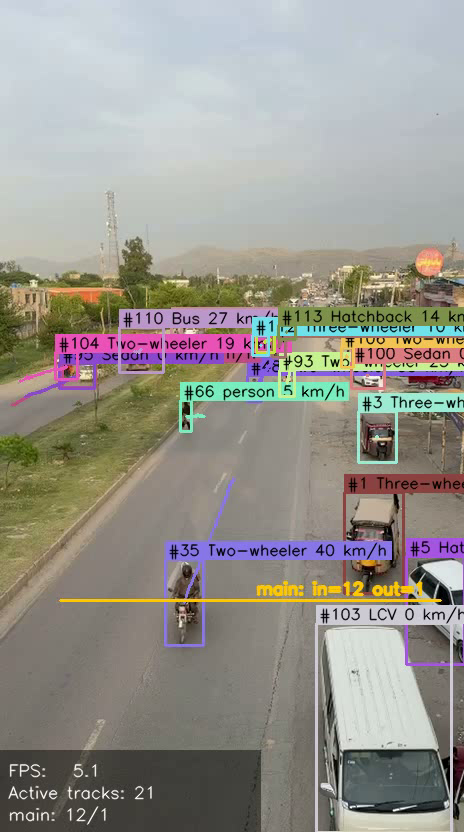
带有稳定 ID 和计数线的追踪画面——这是南亚混合街道交通场景,包括自动人力车 (`Three-wheeler`)、卡车、轿车、两轮车和行人,均被单独分类:
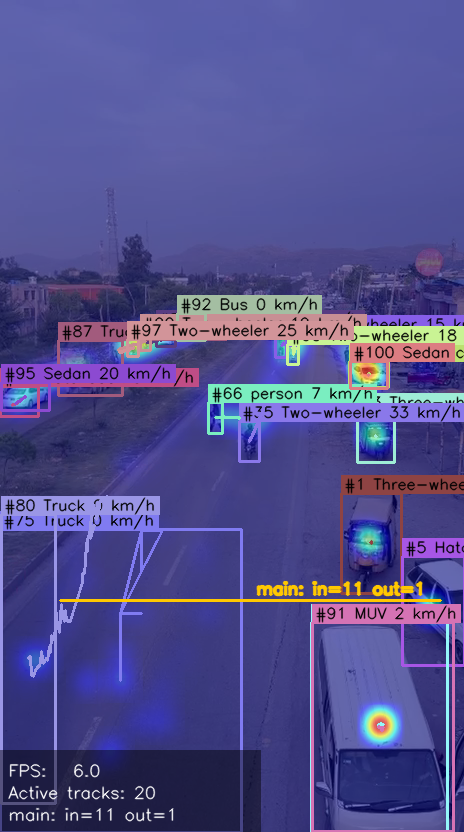
显示整段视频中动态积累情况的热力图叠加。这些轨迹描绘了每一个被追踪的车辆和行人实际驶过或走过的路径:
实时 pipeline 输出的简短循环演示:

## 快速上手
```
git clone https://github.com/Tariqbaloch786/visionflow
cd visionflow
pip install -e ".[app,dev]"
# (可选,推荐)fetch South Asian traffic detector 的权重
python scripts/download_models.py
# 生成 starter config 并运行它
visionflow init-config my.yaml
visionflow run --config my.yaml --source path/to/video.mp4
```
就这么简单。默认情况下,你会得到 `outputs/run.mp4`(带标注的视频)和 `outputs/tracks.csv`(每帧中的每条轨迹占一行)。
### 针对南亚交通的检测(自动人力车等)
基于 COCO 数据集训练的 `yolov8n.pt` 并没有三轮车类别,因此自动人力车会根据角度被错误地分类为 `truck`、`car` 或 `motorcycle`。为了解决这个问题,示例配置使用了 **IISc 的 UVH-26**(YOLOv11-S,在印度交通数据上进行了 fine-tuning,包含 Three-wheeler 在内的 14 个类别)作为主要检测器,并运行原生的 `yolov8n.pt` 作为辅助检测器,仅用于识别 `person` 类别——这样你就能在同一条 pipeline 中获得准确的车辆类别*和*行人信息。
运行一次 `python scripts/download_models.py`,即可将 UVH-26 权重下载到 `models/uvh26.pt`。如果你想退回到仅使用 COCO,请删除配置中的 `secondary_detector:` 块,并将 `detector.weights` 指向 `yolov8n.pt`。
如果你更愿意使用 Docker:
```
docker build -t visionflow .
docker run --rm -v $(pwd)/examples:/app/examples visionflow run -c examples/sample_config.yaml --no-show
```
## 架构剖析
```
┌──────────────┐
video stream ─▶│ Detector │── boxes ─┐
│ (YOLOv8) │ │
└──────────────┘ ▼
┌──────────────┐
│ Tracker │── tracks ─┐
│ (greedy IoU) │ │
└──────────────┘ ▼
┌──────────────┐
│ Analytics │
│ - lines │
│ - speed │
│ - heatmap │
└──────────────┘
│
▼
annotated video + CSV + dashboard
```
每个阶段都是一个拥有简洁接口的类。想把 IoU tracker 换成 ByteTrack?替换一个文件即可。想添加新的分析模块?放入文件并在 pipeline 中调用它的 `update(tracks)` 即可。这些组件之间互不耦合。
## 一段话讲透速度估算
你点击四个图像点,圈定一块已知面积的道路区域——比如一段 3.5 m × 12 m 的车道。VisionFlow 会计算出一个单应性矩阵,将像素映射到地面平面的米制坐标,将每条轨迹的质心投影到该平面上,并用世界空间的距离除以流逝的时间。一个短小的环形缓冲区用于平滑检测器的抖动。这是标准的单摄像头方法,对于交通研究来说效果足够好;其准确性取决于你校准的象限内道路实际的平整程度,以及你点击角点时的仔细程度。
## 配置说明
所有设置都集中在一个 YAML 文件中。默认值非常合理;你真正必须设置的只有 `source` 和 `lines` 字段。
```
source: "0" # webcam id, file path, or rtsp:// url
detector:
weights: yolov8n.pt
conf: 0.30
classes: [2, 5, 7] # COCO ids: car, bus, truck
tracker:
iou_threshold: 0.30
max_age: 30
min_hits: 3
lines:
- name: north
start: [0, 400]
end: [1280, 400]
speed:
enabled: true
image_quad:
- [560, 360]
- [720, 360]
- [900, 600]
- [380, 600]
world_size_m: [3.5, 12.0]
fps: 30.0
heatmap:
enabled: true
decay: 0.92
output:
video: outputs/run.mp4
csv: outputs/tracks.csv
show: true
```
运行 `visionflow init-config my.yaml`,你将获得一个预填好的入门文件,可以直接进行编辑。
## 实际应用场景
同一套 pipeline,不同的业务领域——只需更改权重和区域设置:
- **交通工程** — 按方向统计车流量、校园周边的超速研究、用于交通信号配时决策的拥堵热力图。
- **零售** — 入口客流量统计、用于比较店铺布局的停留时间热力图、排队长度预警。
- **仓库与堆场** — 叉车超速合规性检查(OSHA 规定上限为 8 mph)、月台吞吐量、人车冲突区域监控。
- **建筑工地** — PPE 及人员编制核查、设备利用率、周边访问控制。
- **野生动物与农业** — 鱼道计数、牲畜穿越监控、拖拉机在田间作业的覆盖范围。
- **体育** — 从转播或固定摄像机视角进行球员追踪和位置热力图分析。
面试推介只需一句话:*一套分析核心,无限业务可能——那些枯燥的部分(强类型配置、可插拔流程、测试、CI、Docker)正是保证其可移植性的关键*。
## 运行仪表板
```
streamlit run src/visionflow/app.py
```
选择一个配置,点击 Run,看着画面流转进来。随着视频的播放,计数数据会实时更新。
## 开发指南
```
make dev # editable install with extras
make test # 17 unit tests, runs in under a second
make lint # ruff
make type # mypy
make docker # container build
```
CI 会在每次提交代码时,针对 Python 3.10、3.11 和 3.12 版本运行 lint、类型检查、测试套件以及 Docker 构建。
## 局限性
我宁愿坦诚面对边缘情况,也不愿过度推销:
- IoU tracker 没有外观模型。如果两辆车完全相互遮挡,ID 可能会互换。这对于稀疏的高速公路场景尚可,但不适合拥挤的人行横道。如果你有此需求,请替换为 ByteTrack 或 DeepSORT。
- 速度估算假设标定的象限位于平坦的地平面上。斜坡和崎岖的路面会导致估算产生偏差。
- 在 CPU 上运行 YOLOv8n 以 640 px 分辨率处理时大约只有 5 到 10 FPS。若要实现 HD 级别的实时处理,你需要一块 GPU,或者导出至 ONNX/TensorRT(已列入路线图)。
- Streamlit 仪表板仅支持单用户,并不适用于生产环境部署。它的存在只是为了让你能快速演示 pipeline。
## 路线图
- ByteTrack 和 OC-SORT 作为即插即用的替代方案
- 用于相机标定的交互式四点选取工具
- 分析输出中按类别细分的统计
- 用于边缘部署的 ONNX / TensorRT 导出
- WebRTC 流式输出
## 许可证
MIT。详情请见 [LICENSE](LICENSE)。
标签:CNCF毕业项目, Kubernetes, Python, YOLOv8, 交通分析, 多目标跟踪, 无后门, 计算机视觉, 请求拦截, 逆向工具