evansnyanney/Principal-Geodesic-Based-3D-Point-Cloud-Clustering-Analysis
GitHub: evansnyanney/Principal-Geodesic-Based-3D-Point-Cloud-Clustering-Analysis
基于局部主测地线分析和谱聚类的 3D 点云无监督学习 pipeline,用于检测和验证制造零件之间的结构几何变化。
Stars: 0 | Forks: 0
# 使用无监督学习揭示嵌入在 3D 点云中的工艺与设计之间的关系
[](https://doi.org/10.1016/j.mfglet.2025.06.169)
[](https://doi.org/10.5281/zenodo.20690053)
[](LICENSE)

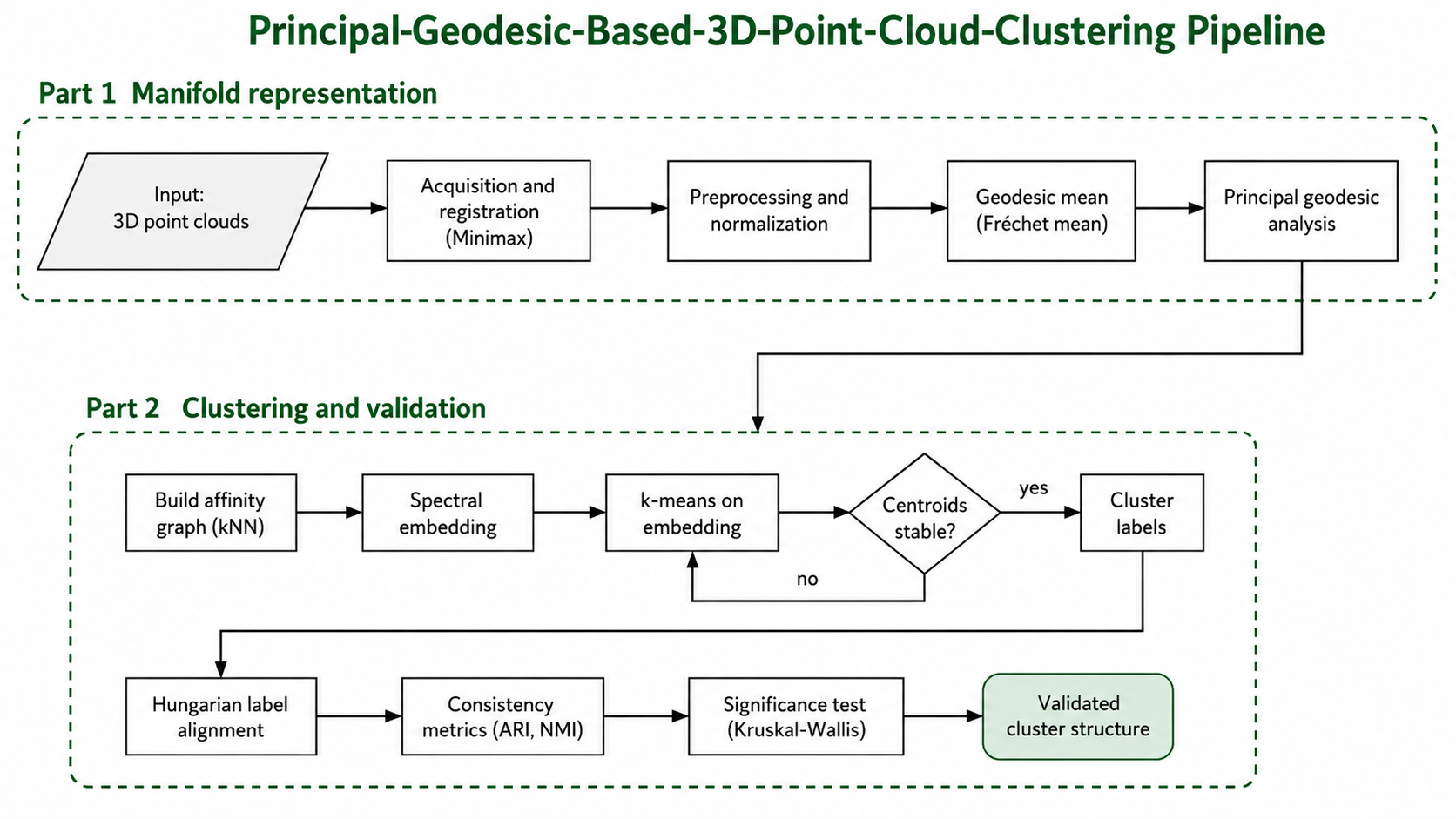
## Pipeline 架构
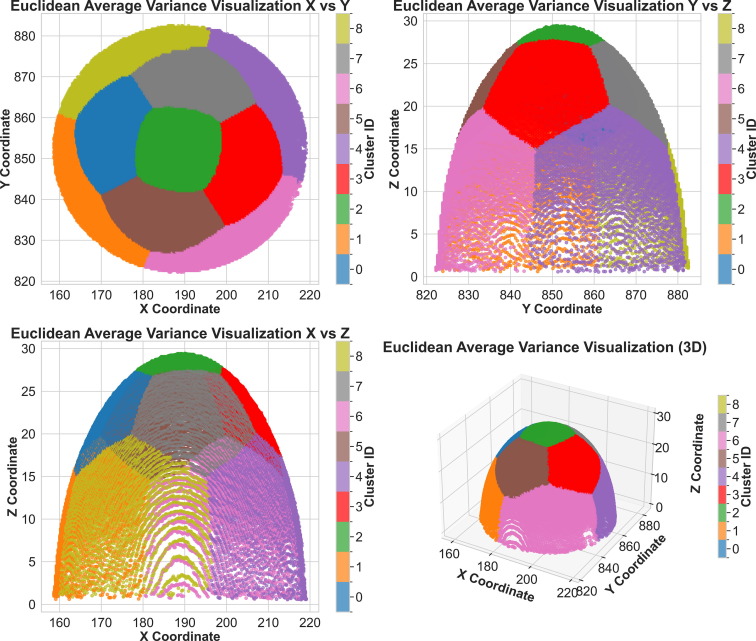
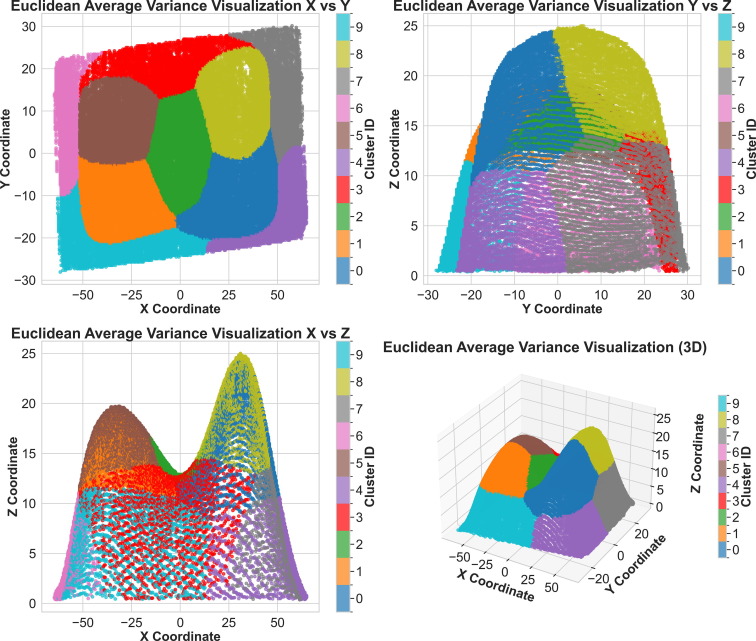
Euclidean Average Variance Visualizations for 3D point cloud scans. Left: Half Ball geometry. Right: Freeform geometry.
## 运行 Pipeline 1. **配置设置**:在 `pga_pipeline/config.py` 中调整您的超参数。 2. **执行**: python -m scripts.run_analysis 3. **检查**:检查 `results/` 文件夹中的 3D 散点图、平均方差映射、测地线向量和 CSV 报告。 ## 引用 如果本仓库对您的研究或工作有帮助,请引用该论文: **论文:** ### BibTeX ``` @article{nyanney2025unveil, title={Unveil the relationship between process and design embedded in the 3D point cloud using unsupervised learning}, author={Nyanney, Evans and Geng, Zhaohui}, journal={Manufacturing Letters}, volume={44}, pages={1498--1506}, year={2025}, publisher={Elsevier} } ``` ## 许可证 MIT License。详情请参阅 `LICENSE`。标签:3D点云, Apex, Python, 无后门, 无监督学习, 机器学习, 聚类分析, 逆向工具