ezekielamitchell/project-aegis
GitHub: ezekielamitchell/project-aegis
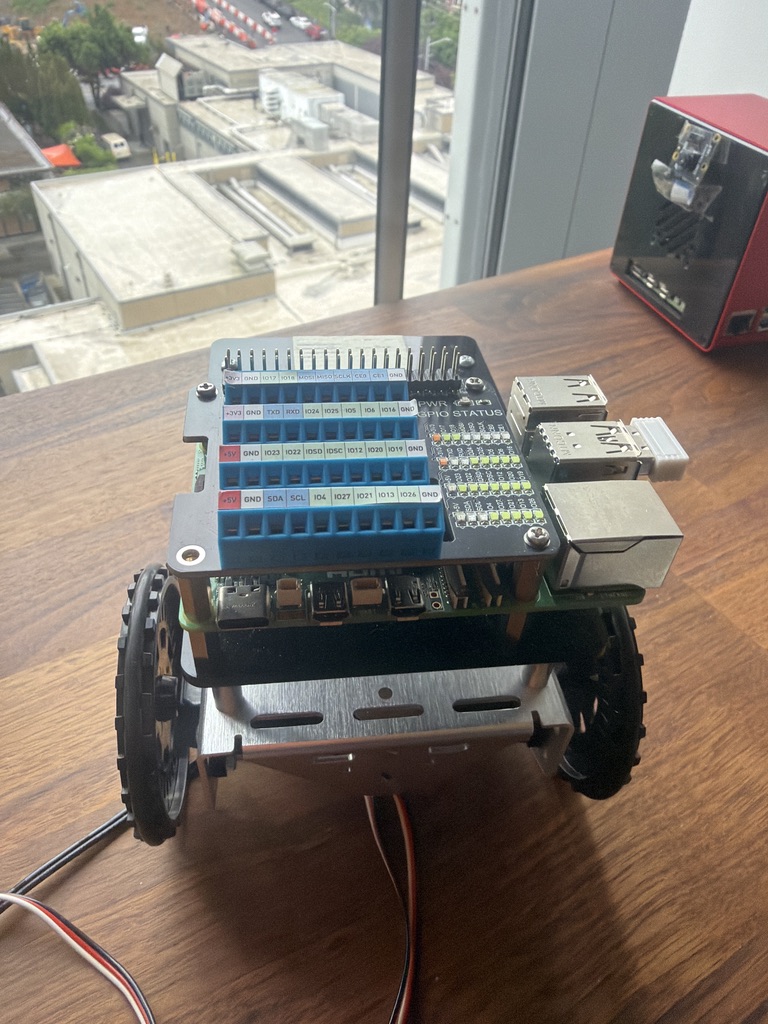
AEGIS是一个基于边缘计算的自主巡逻机器人系统,通过时间验证层有效降低威胁检测的误报率。
Stars: 1 | Forks: 0
# AEGIS
**自主边缘地面智能系统**
Ezekiel A. Mitchell
2026年5月
标签:AMSI绕过, OpenCV, pytest, Python, Ubuntu Server, YOLOv8n, 低功耗, 减少误报, 单板计算机, 威胁检测, 威胁检测系统, 实时检测, 嵌入式系统, 无云依赖, 无后门, 时间验证, 智能监控, 机器人, 树莓派5, 模块化平台, 模块化设计, 自主巡逻, 自主机器人, 自主系统, 自动化修复, 计算机视觉, 设备端推理, 轻量级机器人平台, 边缘AI, 边缘计算, 逆向工具