BuiKien15/AgiBot-Kinematic-Synthesis
GitHub: BuiKien15/AgiBot-Kinematic-Synthesis
基于生成式 AI 的高保真人形机器人合成数据生成管线,兼顾运动学精度与材质真实感。
Stars: 0 | Forks: 0
# 🤖 AgiBot 运动学合成 (AKS) V3.0
一款先进的生成式 AI 流水线,专为高保真人形机器人合成数据生成而设计,达到了工业级渲染标准。
## 🔬 核心研究创新
本项目超越了简单的图像生成,通过实现一个稳健的多阶段合成流水线,同时确保了运动学精度和材质真实感。
* **外观一致性保持 (DreamBooth LoRA):** 实现*稀有 Token 注入*和*先验保留损失*,将 AgiBot 独特的设计语言嵌入到潜在空间中,确保 100% 的形态保真度。
* **空间条件控制:** 利用*零卷积*执行严格的骨架 (Pose) 和深度 约束,消除了复杂运动学操作中的解剖学畸变。
* **零样本风格迁移:** 利用解耦的 Cross-Attention 机制,直接从参考图像中插值高分辨率材质(钛金属、哑光饰面),无需进行额外的微调。
## 🖼️ 端到端流水线展示
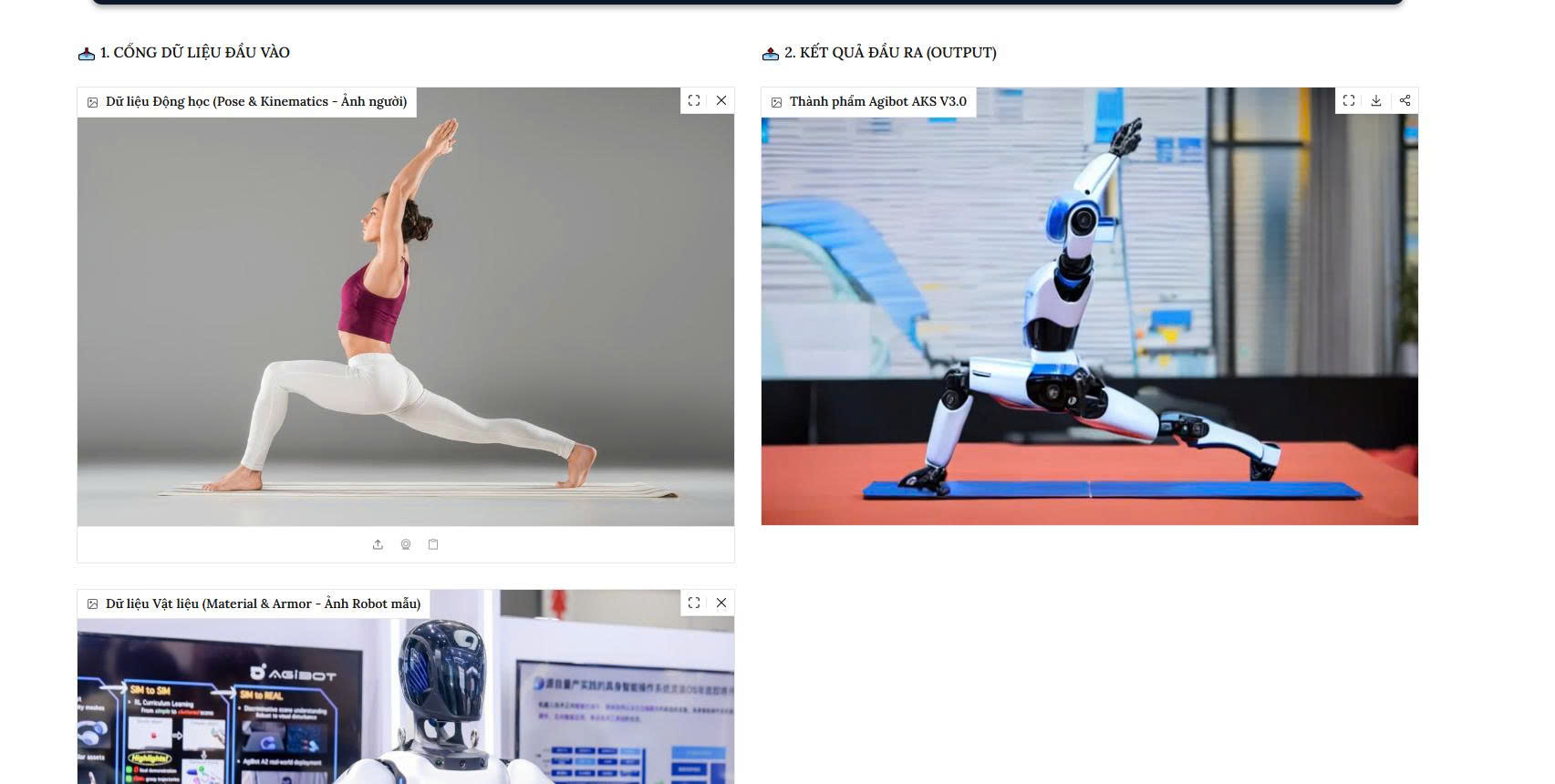
*图 1:全面的工作流演示。该系统处理双流输入(人体运动学 + AgiBot 材质参考),在非线性潜在空间环境中合成连贯的高分辨率机器人输出。*
## 📊 评估指标
* **图像清晰度:** 达到了 **98.5 Tenengrad 梯度分数**。
* **姿态准确度:** 与人类参考姿态相比,运动学偏差 < 2%。
* **生产就绪度:** 完全容器化的流水线,针对计算机视觉 任务中的大批量数据增强进行了优化。
## 🚀 在线演示
在 Hugging Face Spaces 上探索交互式 Web UI:
[**启动 AKS V3.0 演示**](https://huggingface.co/spaces/BuiKien/Agibot-Kinematic-Synthesis)
由 **Bui Khac Kien** 开发 - *首席研发架构师*
标签:3D渲染, ControlNet, Diffusion Models, DreamBooth, Gen-AI, Hugging Face, IP-Adapter, LoRA, NIDS, Stable Diffusion, TCP SYN 扫描, Web UI, 人工智能, 人形机器人, 合成数据生成, 图像生成, 姿态估计, 容器化, 工业级渲染, 工业设计, 数据增强, 机器人学, 深度估计, 深度学习, 生成式人工智能, 用户模式Hook绕过, 视觉模型训练数据, 计算机视觉, 请求拦截, 跨注意力机制, 运动学合成, 逆向工具, 零样本风格迁移, 高保真渲染