packerlschupfer/nova-voyager_firmware
GitHub: packerlschupfer/nova-voyager_firmware
为 Teknatool Nova Voyager DVR 钻床 HMI 控制器提供功能更完善、启动更快、完全开源的替代固件,包含逆向工程的电机协议文档、多种可组合攻丝触发器和硬件级安全急停机制。
Stars: 3 | Forks: 0
# Nova Voyager 开源固件
**Teknatool Nova Voyager DVR** 钻床 HMI 控制器 (GD32F303RCT6, ST7920 16×4 LCD, FreeRTOS) 的开源替代固件。
## 与原始 Teknatool 固件的差异
| 方面 | 原版 (R2P06x CG) | 本固件 |
|--------|----------------------|----------------|
| 许可证 | 封闭,专有 | GPL-3.0 |
| 源码 | 不公开 | 公开,完全文档化 |
| 冷启动 | ~5 s | ~1.7 s |
| 软启动 | ~0.5 s | ~0.25 s |
| LCD 模式 | 图形模式 — 动画 logo,图标 | **仅文本** — 见下方说明 |
| 攻丝 | 单一模式 | 6 种**可组合**触发器 + 手动踏板 |
| 脚踏板输入 | 在 `X11` 上暴露了接口但**未使用** | 作为 PC3 输入驱动 — 实现免提断屑和反向覆盖(参见[脚踏板部分](#foot-pedal--optional-hardware-addition)) |
| 硬件 E-Stop | 通过 UART 进行软件排队 | 在任何队列之前的直接 GPIO 切断 (PD4) |
| 调度器 | 裸机 | FreeRTOS,5 个任务,带每任务心跳看门狗 |
| 固件更新 | 仅限供应商工具 | 标准 USB DFU(配合配套 bootloader) |
| 终端用户诊断 | 无 | 串行控制台:98 条命令,实时状态,栈/堆监视器 |
| MCB 协议 | 未文档化 | 已在 `docs/MOTOR_PROTOCOL.md` 中文档化 |
| 安全联锁 | 固定 | 防护罩 / 脚踏板 / 深度检查可单独配置 |
**为什么是纯文本 LCD?** 原始固件以图形模式驱动 ST7920 用于启动动画和图标。我们特意保持纯文本模式:代码更简洁,启动更快,无闪烁,易于扩展。图形模式的驱动代码保留在仓库(`src/lcd_graphics*.c`,`src/gfx_*.c`)中,供任何想要恢复图标的用户使用 — 反向工程笔记另请参阅 `docs/ST7920_*.md`。
## 快速开始
```
# 构建生产固件 (120 MHz, optimized)
pio run -e nova_voyager
# 通过 ST-Link 烧录 (fast — 假定已通过先前的烧录解锁了 flash)
./flash_firmware.sh quick
# 从 OEM 固件首次安装 (slow — 解锁 flash 保护)
./flash_firmware.sh custom
# 恢复 OEM 固件 (重新锁定 flash 保护)
./flash_firmware.sh original
```
配套 USB DFU bootloader:
[Packerlschupfer/nova-voyager_bootloader](https://github.com/Packerlschupfer/nova-voyager_bootloader)。
## 硬件
| | |
|---|---|
| MCU | GD32F303RCT6 (ARM Cortex-M4F, 120 MHz, 256 KB flash, 48 KB RAM) |
| 显示屏 | ST7920 16×4 字符 LCD,8 位并行 |
| 电机链路 | USART3 @ 9600 波特率 连接 MCB (开关磁阻电机控制器) |
| 输入 | 旋转编码器 + 7 个按钮 (EXTI),脚踏板 |
| 传感器 | 深度 (ADC),防护开关,E-Stop |
| Bootloader | DFU 位于 `0x08000000` (12 KB),应用程序位于 `0x08003000` (244 KB) |
### 引脚映射(关键信号)
| 信号 | 引脚 | 备注 |
|--------|-----|-------|
| LCD 数据总线 | PA0–PA7 | 8 位并行 |
| LCD RS / RW / E | PB0 / PB1 / PB2 | 控制线 |
| 编码器 A / B / 按钮 | PC13 / PC14 / PC15 | 4 计数/棘爪,按钮 = 粗/细切换 |
| E-Stop | PC0 | 高电平有效 — 连接到直接 GPIO 切断路径 |
| 防护开关 | PC2 | 高电平有效 (断开 = 高电平) |
| 脚踏板 | PC3 | 低电平有效 (X11 接口 — 见下文) |
| 深度 ADC | PC1 | ADC1 通道 11 |
| 电机 UART | PB10 / PB11 | TX / RX |
| 调试 UART | PA9 / PA10 | TX / RX,9600 波特率 |
## 脚踏板 — 可选硬件加装
脚踏板完全由用户自行选择 — 没有它所有功能也能正常工作,并且可以在 `菜单 → 攻丝 → 踏板` 中禁用踏板触发器。
### 所需部件(参考构建)
这是我们使用的部件 — 任何同等规格的替代品均可。
| 部件 | 规格 | 位置 |
|------|------|-------|
| 脚踏开关 | **TFS-1** 瞬时 SPST,常开触点 | 位于操作员脚下 |
| 面板插座 | **GX12 2 针** (航空样式螺钉锁紧) | 面板安装在机壳上,位于卡盘防护罩连接器的对面 |
| 内部线缆 | **JST PH 2.54mm 3 针** 连接到 HMI 板的 `X11` 接口 | 面板插座和 PCB 之间的机箱内部 |
| 两段短线缆 | ≥ 22 AWG,长度随意 | 所有接头处均需做应力释放 — 这是踏板,会被踩踏 |
3 个 JST 引脚中仅使用了 2 个(信号 + GND)。`X11` 上的第三个引脚悬空。输入为参考 `GND` 的 `PC3`,**低电平有效** — 当线路被拉低到地时,固件读取为“已按下”。内部上拉电阻意味着空闲状态的踏板(触点断开)无需任何外部电阻即可读取为“已释放”。
### 接线
```
foot chassis panel HMI board
jack
┌─────┐ ┌─────────┐ ┌─────────────┐
│TFS-1│ ─── 2 ──────┤ GX12 ├── 2 ──────────┤ X11 (JST PH │
│ NO │ wire │ 2-pin │ wire │ 3-pin): │
│ SPST│ │ panel │ │ PC3 — sig │
│ │ │ jack │ │ GND │
└─────┘ └─────────┘ │ N/C │
└─────────────┘
<— external —> <— bulkhead —> <— internal —>
```
任一触点方向均可 — 固件在软件中(~20 ms)对线路进行消抖处理,并在 `task_ui.c` 中读取电平。
### 踏板的功能
可在菜单中根据攻丝模式进行配置,典型用途包括:
- **`Pedal` 触发器(手动)** — 断屑:按住切削,松开反转;或定时 `CHIP_BREAK` 模式,每次按下触发短暂的换向脉冲。
- **`Quill` 触发器覆盖** — 踏板可以覆盖主轴方向的自动反转(例如,在切削过程中强制反转,或在每次按下时切换方向)。参见 `include/config.h` 中的 `quill_pedal_mode_t`。
- **所有触发器** — 踏板可与六个自动触发器中的任何一个组合;如果两者同时触发,踏板优先(最高优先级)。
如果已连接踏板但您在特定操作期间不想使用它,请在菜单中保持 **`Pedal`** 触发器未选中状态,它在电气上将被忽略。
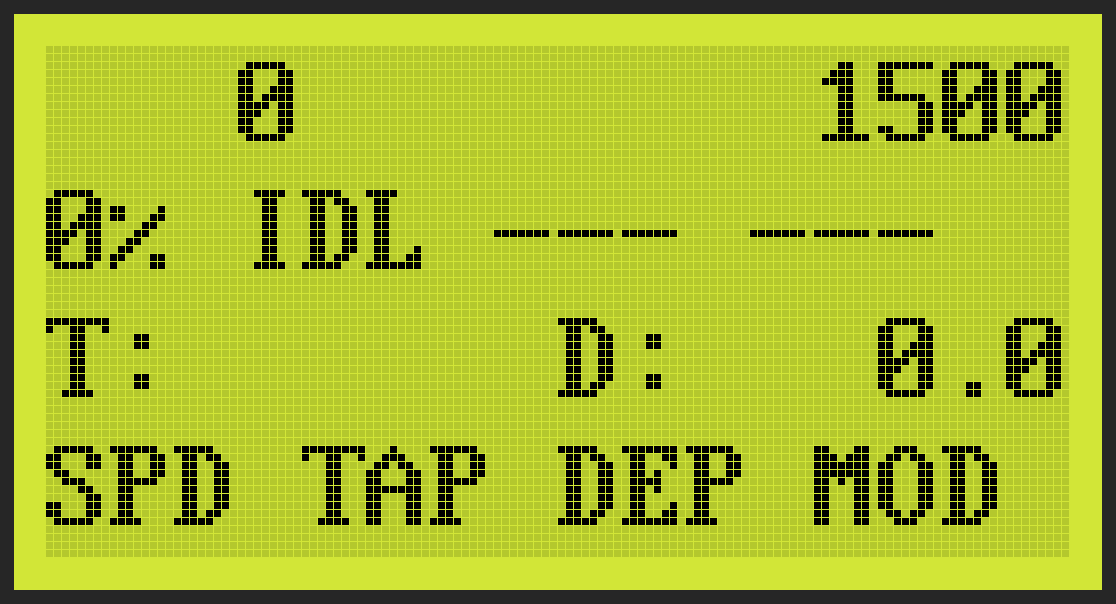
## LCD 布局
```
0 1500 ← actual RPM (left) target RPM (right)
0% IDL --- --- ← load%, state, depth tgt, tap mode/direction
T: D: 0.0 ← target depth (T:) current depth (D:)
SPD TAP DEP MOD ← F-key labels (F1..F4)
```
状态码:`IDL` 空闲 · `RUN` 钻孔中 · `TAP` 攻丝中 · `ERR` 错误。
## 攻丝系统
六种**可组合**触发器。启用任意子集;触发时最高优先级的触发器胜出。
| 代码 | 触发器 | 监视内容 | 用例 |
|:----:|---------|-----------------|----------|
| `D` | 深度 | 主轴深度传感器 | 在目标深度停止 / 反转 |
| `I` | 负载增加 | KR (负载 %) 尖峰 | 盲孔 / 过度阻力 |
| `S` | 负载打滑 | CV (指令速度) 过冲 | 通孔出口检测 |
| `C` | 离合器打滑 | 负载平台期 | 扭矩限制器 / 离合器接合 |
| `Q` | 主轴 | 主轴方向改变 | 主轴抬起时自动反转 |
| `K` | 啄击 | 定时正/反转循环 | 丝锥排屑 |
| `P` | 踏板 | 脚踏板状态 | 手动覆盖 (断屑 / 保持) |
显示字符串 `TAP:DISQ` 表示 深度 + 负载增加 + 打滑 + 主轴 均处于活动状态。
优先级排序:**踏板 > 主轴 > 深度 > 负载 > 啄击**。
## 架构
5 个 FreeRTOS 任务通过队列 + 状态互斥锁进行协调:
| 任务 | 优先级 | 栈 | 频率 | 角色 |
|------|:---:|:-----:|:---:|------|
| Main | 1 | 256 W | ~100 Hz | 事件队列,控制台,看门狗 |
| Depth | 2 | 96 W | 50 Hz | ADC 主轴传感器 |
| UI | 2 | 128 W | 50 Hz | 按钮,编码器,LCD |
| Tapping | 3 | 160 W | 20 Hz | 攻丝状态机 |
| Motor | 4 | 192 W | 2/20 Hz | UART 连接 MCB (自适应:空闲 vs. 运行中) |
每任务心跳看门狗:主循环仅当所有任务最近都更新了其心跳*且*事件队列未饱和时,才喂 IWDG。
三层电机栈:
```
task_motor.c FreeRTOS coordination
└─ motor.c High-level API (start/stop/setSpeed/...)
└─ motor_protocol.c Packet build/parse
└─ motor_uart.c USART3 hardware abstraction
```
## 串行控制台
以 9600 波特率连接 (PA9/PA10)。共有 98 条命令可用。最常用的:
| 命令 | 作用 |
|---------|--------------|
| `HELP` | 列出所有命令 |
| `STATUS` | 系统状态,队列,溢出计数器 |
| `STACK` | 每任务的 FreeRTOS 栈高水位标记 |
| `DEPTH` | 实时深度传感器读数 |
| `GUARD` | 防护罩 / 踏板 / E-Stop GPIO 状态 |
| `GF` | 查询 MCB 标志 |
| `CV` | 查询 MCB 当前速度 |
| `TAP` | 显示 / 配置攻丝触发器 |
| `RESET` / `COLDBOOT` | 软件复位 (软复位 / 冷启动模拟) |
| `DFU` | 重启进入 USB DFU bootloader |
| `SAVE` | 将设置持久化保存到 flash |
## 安全性
- **硬件 E-Stop** — 在任何排队命令之前直接 GPIO 写入 PD4 (电机使能)。不会因任务卡死或队列满而延迟。
- **防护罩联锁** — 防护罩打开时电机拒绝启动;运行中打开防护罩时自动停止。可配置。
- **看门狗** — IWDG ~3 秒,仅当所有任务存活且事件队列正在排空时才喂狗。队列饱和被视为停顿。
- **乐观状态写入** — `motor_running` 在启动时立即设置,因此编码器速度更新路径永远不会被陈旧的标志所门控。
- **设置 flash 写入保护** — `settings_save()` 在电机运行时拒绝写入 flash(flash 擦除会阻塞 CPU 约 20 ms)。
## 项目状态
- 所有主要功能均已实现;固件已在日常使用中
- **81 个本地单元测试**(80 个通过,1 个已记录的跳过 — 需要动态 UART mock)
- 生产构建中 **0** 个编译器警告
- 占用约 **~33% flash** / **~23% RAM**(留有充足余量)
可能的后续工作(均不紧急):
- 动画图形模式(驱动已就绪,仅未启用)
- 用于外部日志记录的蓝牙/串行遥测
- 基于编码器的步进/方向支持,用于 CNC 风格的操作
## 许可证
GNU通用公共许可证 v3.0 — 见 [LICENSE](LICENSE)。
本固件由社区进行逆向工程。**无保修。** 您需自担风险在自己的硬件上运行它。
## 鸣谢
逆向工程和开发基于对原始 Teknatool 固件(R2P05x、R2P06e、R2P06k 变体)的独立分析,并结合了 MCB 协议的逻辑分析仪抓包结果以及大量耐心的实验。感谢车床/钻床社区分享他们的笔记和观察。
 |
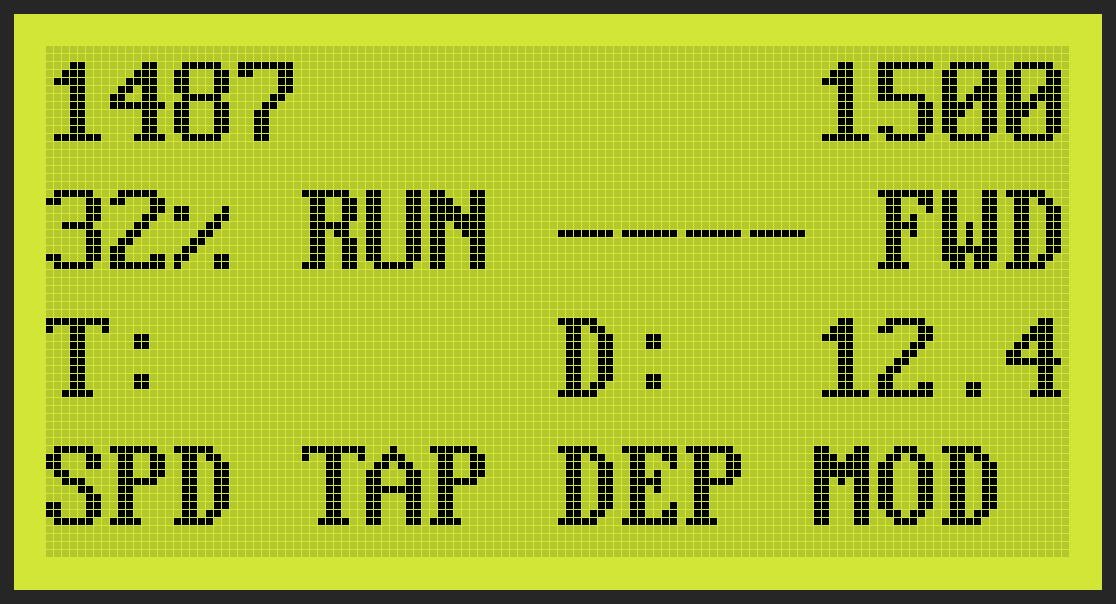 |
| Idle — target 1500 RPM, no depth target | Drilling at 1487 RPM, 32% load, 12.4 mm |
 |
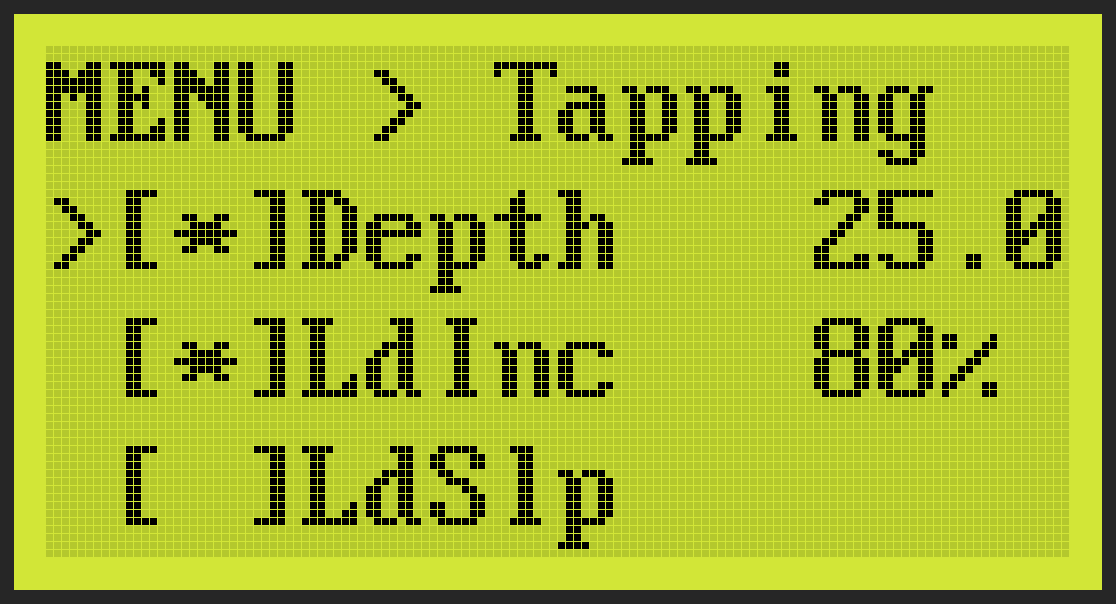 |
| Tapping with Depth+LoadInc+Quill triggers active | Menu: per-trigger configuration |
示例组合
- **深度 + 主轴** — 主轴抬起时自动反转,到达目标深度时硬停止 - **负载增加 + 负载打滑** — 同时涵盖盲孔和通孔场景 - **主轴 + 踏板** — 自动主轴跟随加上手动覆盖 - **深度 + 负载 + 主轴** — 最大范围安全保障:任一条件满足即触发标签:CNC控制, FreeRTOS, GD32F303, GPIO控制, GPL-3.0, HMI人机界面, PKINIT, ST7920, USB DFU, 云资产清单, 制造执行系统, 协议逆向, 固件替换, 客户端加密, 嵌入式开发, 工业控制系统, 工控协议分析, 工控安全, 开源固件, 机电控制, 硬件E-Stop, 硬件黑客, 自动化控制, 逆向工程, 钻床控制