christianpeirson/argos-edge
GitHub: christianpeirson/argos-edge
将多个 SDR 与网络分析 CLI 整合到单一 SvelteKit 仪表板中,在边缘设备上实现射频、网络与地理定位数据的实时态势感知。
Stars: 1 | Forks: 0




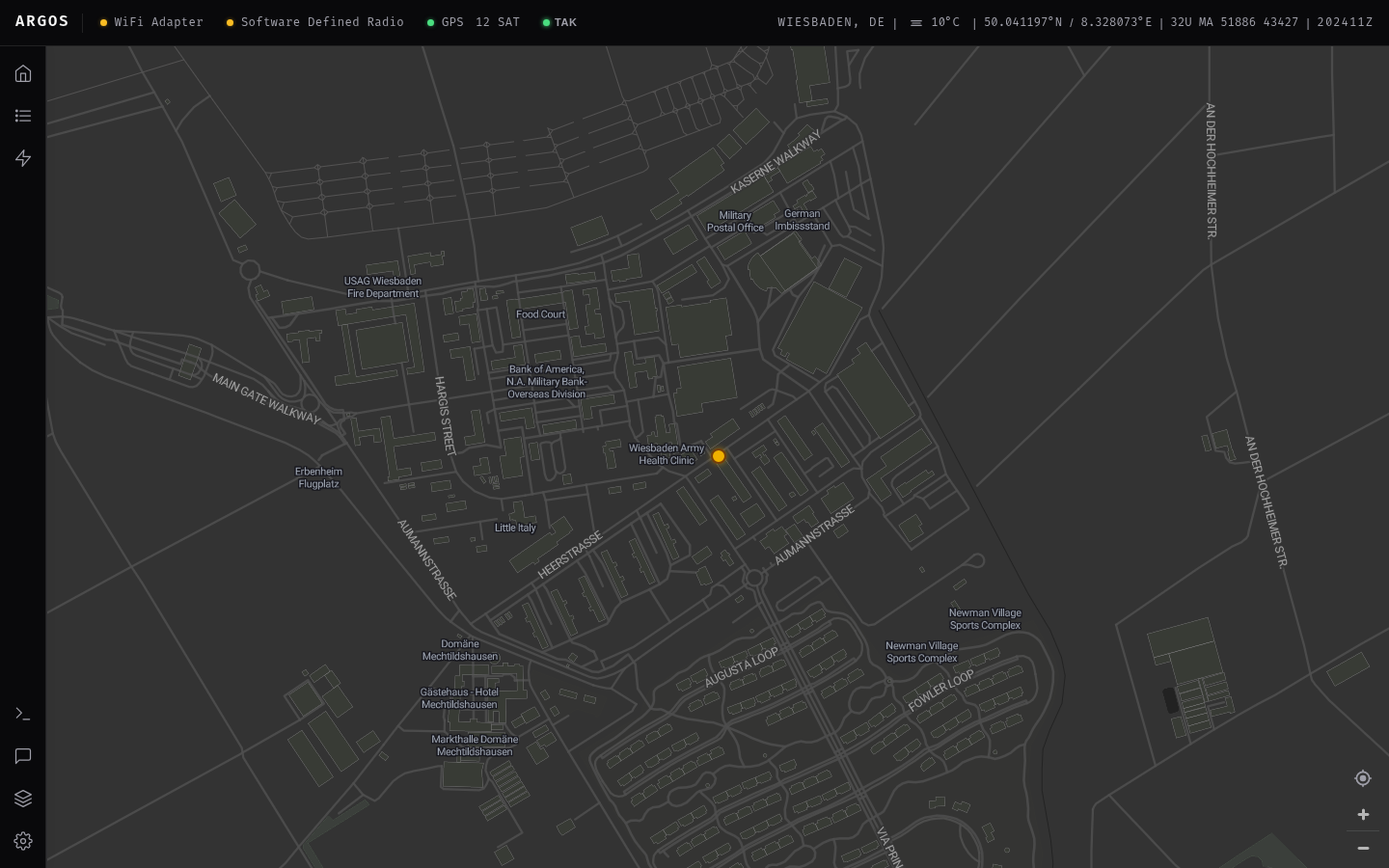
 Live status bar — WiFi / SDR / GPS / TAK status with MGRS grid and Zulu time |
标签:MITM代理, SDR软件无线电, SvelteKit, 信号情报, 战术指控系统, 插件系统, 用户代理, 系统分析, 网络分析, 网络安全, 自动化攻击, 请求拦截, 隐私保护