kbhujbal/probabilistic_SLAM_quadruped_robot
GitHub: kbhujbal/probabilistic_SLAM_quadruped_robot
一个基于C++17和ROS 2的概率高程建图系统,用于解决移动机器人在位姿不确定下的地形建图问题。
Stars: 30 | Forks: 0
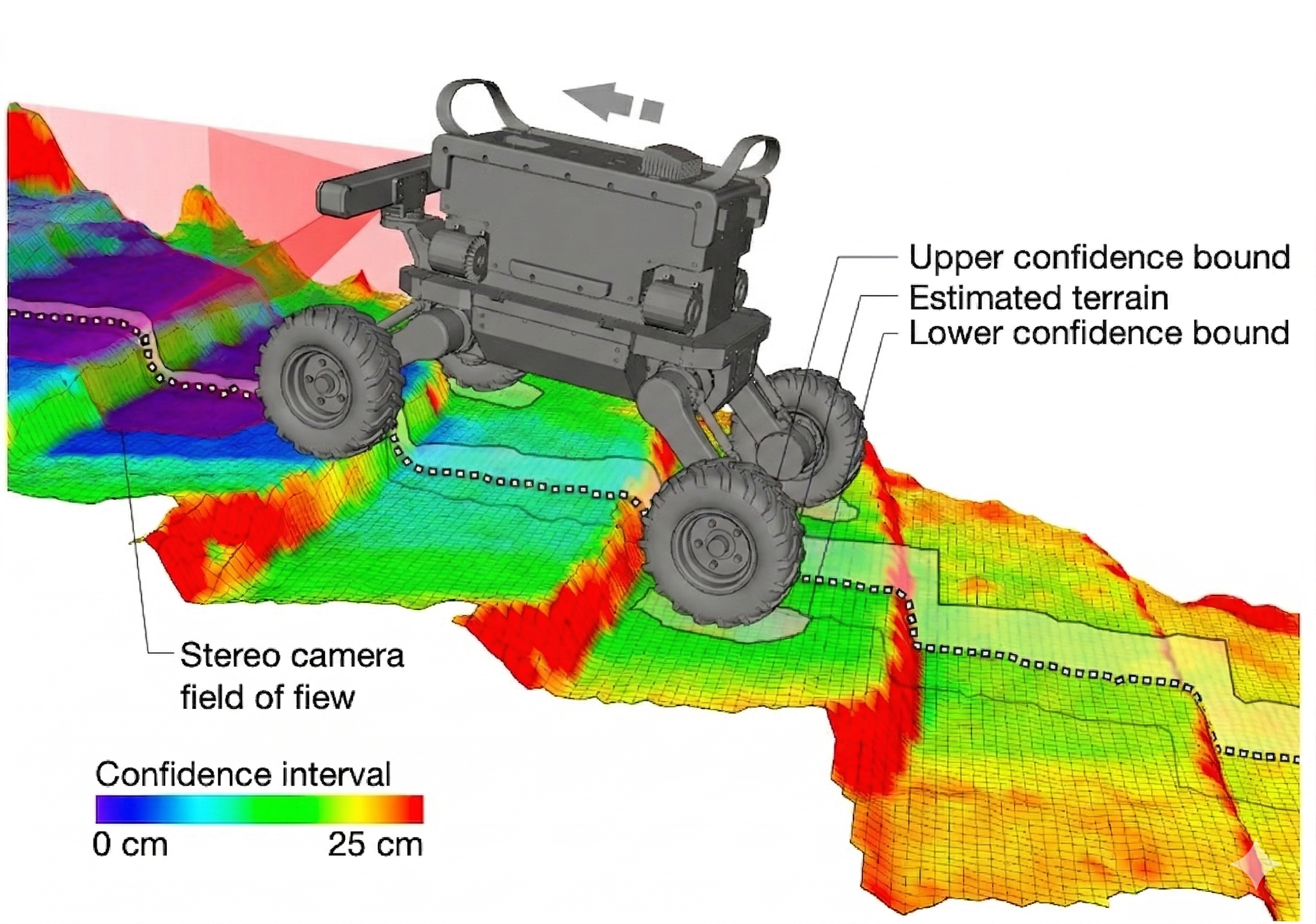
# 面向定位不确定移动机器人的概率地形建图
论文的 C++/ROS 2 实现:
标签:3D协方差传播, C++17, Gazebo仿真, HTTP头分析, Kinect v2, RealSense D435, RMSE评估, ROS 2, Velodyne VLP-16, 传感器融合, 动态环境适应, 卡尔曼滤波, 地形映射, 射线追踪可见性检查, 机器人导航, 机器人技术, 概率高程映射, 漂移分析, 状态估计, 经验CDF融合, 置信界估计, 自动驾驶, 覆盖率评估, 轮式里程计噪声模型, 马氏距离, 高程地图