NawfalMotii79/PLFM_RADAR
GitHub: NawfalMotii79/PLFM_RADAR
开源低成本的 10.5 GHz 脉冲线性调频相控阵雷达系统,支持电子波束扫描和完整信号处理链路。
Stars: 21667 | Forks: 5100
# AERIS-10:开源脉冲线性调频相控阵雷达
[](https://opensource.org/licenses/MIT)
[](https://github.com/NawfalMotii79/PLFM_RADAR)
[](https://github.com/NawfalMotii79/PLFM_RADAR))
[](https://github.com/NawfalMotii79/PLFM_RADAR/pulls)

AERIS-10 是一个开源、低成本的 10.5 GHz 相控阵雷达系统,采用脉冲线性调频(LFM)调制。它提供两个版本(3km 和 20km 量程),专为希望探索和实验相控阵雷达技术的研究人员、无人机开发者和资深 SDR 爱好者设计。

## 📡 概述
AERIS-10 项目旨在通过提供一个完全开源、模块化且可破解的雷达系统,来推动雷达技术的普及。无论您是大学研究人员、无人机初创公司,还是高级创客,AERIS-10 都为您提供了一个用于实验波束成形、脉冲压缩、多普勒处理和目标跟踪的平台。
## 🔬 主要特性
- **开源硬件与软件** - 提供完整的原理图、PCB 布局、固件和软件
- **双版本可用**:
- **AERIS-10N (Nexus)**:3km 量程,配备 8x16 贴片天线阵列
- **AERIS-10X (Extended)**:20km 量程,配备 32x16 介质填充缝隙波导阵列
- **全电子波束控制** - 在俯仰和方位角上实现 ±45° 电子控制
- **高级信号处理** - 板载 FPGA 处理脉冲压缩、多普勒 FFT、MTI 和 CFAR
- **Python GUI** - 具备地图集成的用户友好界面
- **GPS/IMU 集成** - 实时位置和姿态校正
- **模块化设计** - 电源管理、频率合成和 RF 板分离
## 🏗️ 系统架构
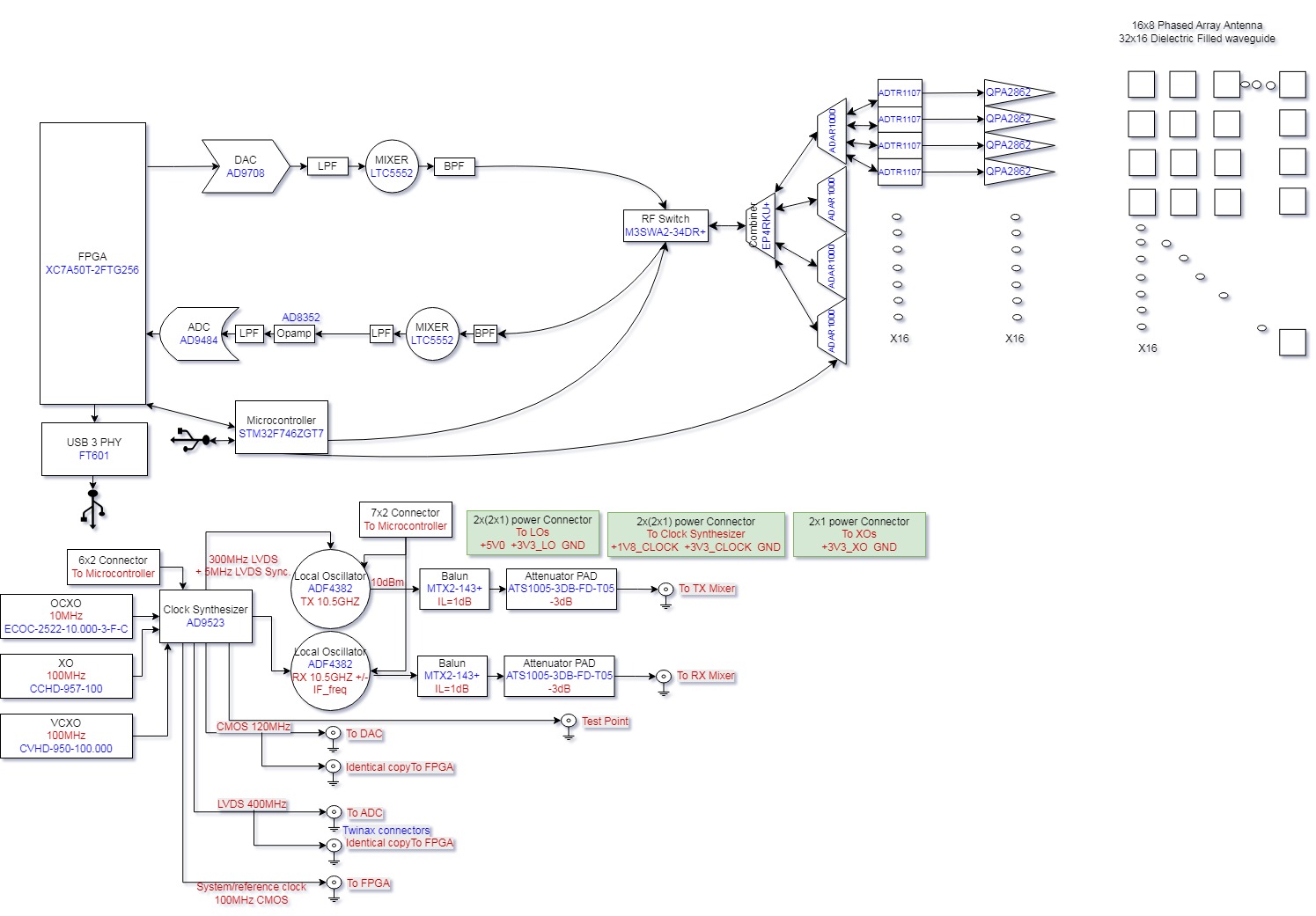
### 硬件组件
AERIS-10 的主要子系统包括:
- **电源管理板** - 为电子元件提供所有必要的电压水平,并具备适当的滤波和排序(排序由微控制器确保)
- **频率合成器板** - 使用高性能低抖动时钟发生器 (AD9523-1),为以下组件提供相位对齐的时钟参考:
- RX 和 TX 频率合成器 (ADF4382)
- DAC
- ADC
- FPGA
- **主板** 包含:
- **DAC** - 生成雷达 Chirp 信号
- **2 个微波混频器 (LT5552)** - 用于上变频和 IF 下变频
- **4 个 4 通道移相器 (ADAR1000)** - 用于 RX 和 TX 链波束成形
- **16 个前端芯片 (ADTR1107)** - 用于低噪声放大 (RX) 和功率放大 (TX) 级
- **XC7A100T FPGA** - 处理雷达信号:
- 通过 DAC 生成 PLFM Chirp 信号
- 原始 ADC 数据读取
- 自动增益控制 (AGC)
- I/Q 基带下变频
- 抽取
- 滤波
- 正向 FFT
- 脉冲压缩
- 多普勒、MTI 和 CFAR 处理
- USB 接口
- **STM32F746xx 微控制器** - 用于:
- 上电和下电排序(参见电源管理 Excel 文件)
- FPGA 通信
- 设置和连接以下组件:
- 时钟发生器 (AD9523-1)
- 2 个频率合成器 (ADF4382)
- 4 个 4 通道移相器 (ADAR1000),用于雷达脉冲排序
- 2 个 ADS7830 ADC(位于功率放大器板上),用于 Idq 测量
- 2 个 DAC5578(位于功率放大器板上),用于 Vg 控制
- GPS 模块,用于 GUI 地图居中
- GY-85 IMU,用于目标坐标的俯仰/横滚校正
- BMP180 气压计
- 步进电机
- 8 个 ADS7830 温度传感器,用于冷却风扇控制
- RF 开关
- **16 个功率放大器板** - 仅用于 AERIS-10E 版本,具有 10Watt QPA2962 GaN 放大器以扩展范围
- **天线阵列**:
- **AERIS-10N (Nexus)** - 8x16 贴片天线阵列
- **AERIS-10X (Extended)** - 32x16 介质填充缝隙波导天线阵列
- **杂项组件**:
- 滑环
- 步进电机及驱动器
- 冷却风扇
- 外壳)
### 处理流水线
1. **波形生成** - DAC 创建 LFM chirp 信号
2. **上/下变频** - LT5552 混频器处理频率转换
3. **波束控制** - ADAR1000 移相器控制 16 个元件
4. **信号处理 (FPGA)**:
- 原始 ADC 数据采集
- I/Q 基带下变频
- 抽取与滤波 (CIC/FIR)
- 脉冲压缩
- 多普勒 FFT 处理
- MTI 和 CFAR 检测
5. **系统管理 (STM32)**:
- 电源排序
- 外设配置
- GPS/IMU 集成
- 步进电机控制
6. **可视化**:
- 实时目标绘图
- 地图集成
- 雷达控制界面
## 📊 技术规格
| 参数 | AERIS-10N (Nexus) | AERIS-10X (Extended) |
|-----------|-------------------|----------------------|
| **频率** | 10.5 GHz | 10.5 GHz |
| **最大量程** | 3 km | 20 km |
| **天线** | 8x16 贴片阵列 | 32x16 缝隙波导 |
| **波束控制** | 电子 (±45°) | 电子 (±45°) |
| **机械扫描** | 360° (步进电机) | 360° (步进电机) |
| **输出功率** | ~1Wx16 | 10Wx16 (GaN 放大器) |
| **处理器** | FPGA + STM32 | FPGA + STM32 |
## 🚀 快速开始
### 前置条件
- 基本的雷达原理理解
- PCB 组装经验(用于硬件构建)
- Python 3.8+(用于 GUI 软件)
- FPGA 开发工具 用于信号处理修改
### 硬件组装
1. **订购 PCB**:所有 Gerber 文件位于 `/4_Schematics and Boards Layout`
2. **采购组件**:物料清单 (BOM) 位于 `/4_Schematics and Boards Layout/4_7_Production Files`
3. **组装**:遵循 `/10_docs/assembly_guide.md` 中的组装指南
4. **天线**:根据您的版本选择合适的天线阵列
5. **外壳**:3D 可打印文件位于 `/10_docs/Hardware/Enclosure`
标签:10.5GHz, AERIS-10, CFAR, FPGA, LFM, MTI, PLFM, Python GUI, SDR, X波段雷达, 多普勒处理, 天线阵列, 客户端加密, 嵌入式系统, 开源雷达, 微波技术, 数字信号处理, 无人机探测, 波束成形, 电子工程, 电磁频谱, 目标跟踪, 相控阵雷达, 硬件安全, 科研设备, 脉冲压缩, 软件定义无线电, 远程 sensing, 逆向工具