Sunil56224972/pico-rubber-ducky
GitHub: Sunil56224972/pico-rubber-ducky
基于 Raspberry Pi Pico 打造的低成本 USB Rubber Ducky,支持 DuckyScript 脚本执行与无线控制。
Stars: 6 | Forks: 0
pico-ducky
使用 Raspberry Pi Pico 制作廉价但强大的 USB Rubber Ducky
# 空行





## 快速入门指南 在 5 分钟内完成安装并让您的 USB Rubber Ducky 开始工作。 1. 从 [Releases](https://github.com/dbisu/pico-ducky/releases) 页面下载最新版本。 2. 按住 boot 按钮的同时将设备插入 USB 端口。它将显示为一个名为 RPI-RP2 的可移动媒体设备。 3. 在 Pico 或 Pico W 上安装 CircutlPython 如果使用 Pico 开发板: 将 adafruit-circuitpython-raspberry_pi_pico-en_US-10.0.3.uf2 文件复制到 Pico (RPI-RP2) 的根目录。设备将重启,大约一秒钟后,它将重新连接为 CIRCUITPY。 如果使用 Pico W 开发板: 将 adafruit-circuitpython-raspberry_pi_pico_w-en_US-10.0.3.uf2 文件复制到 Pico (RPI-RP2) 的根目录。设备将重启,大约一秒钟后,它将重新连接为 CIRCUITPY。 如果使用 Pico 2 开发板: 将 adafruit-circuitpython-raspberry_pi_pico2-en_US-10.0.3.uf2 文件复制到 Pico (RPI-RP2) 的根目录。设备将重启,大约一秒钟后,它将重新连接为 CIRCUITPY。 如果使用 Pico 2W 开发板: 将 adafruit-circuitpython-raspberry_pi_pico2_w-en_US-10.0.3.uf2 文件复制到 Pico (RPI-RP2) 的根目录。设备将重启,大约一秒钟后,它将重新连接为 CIRCUITPY。 4. 将 lib 文件夹复制到 CIRCUITPY 的根目录 5. 将 *.py 复制到 CIRCUITPY 的根目录 6. 按照 README.md 中的说明进入设置模式 7. 将您的 payload 复制为 payload.dd 到 CIRCUITPY 的根目录 8. 从 USB 端口拔下设备并移除设置跳线。 享受您的 Pico-Ducky。 ## 设置模式 要编辑 payload,请通过将引脚 1 (`GP0`) 连接到引脚 3 (`GND`) 来进入设置模式,这将阻止 pico-ducky 在您自己的机器上注入 payload。 最简单的方法是在这些引脚之间使用一根跳线,如下所示。  ## USB 启用/禁用模式 如果您出于隐蔽性需要 pico-ducky 不显示为 USB 大容量存储设备,请按照以下说明操作。 - 进入设置模式。 - 将您的 payload 脚本复制到 pico-ducky。 - 将 pico 与主机 PC 断开连接。 - 在引脚 18 (`GND`) 和引脚 20 (`GPIO15`) 之间连接一根跳线。 这将阻止 pico-ducky 在插入目标计算机时显示为 USB 驱动器。 - 移除跳线并重新连接到您的 PC 以进行重新编程。 Pico:默认模式为 USB 大容量存储已启用。 Pico W:默认模式为 USB 大容量存储**已禁用** 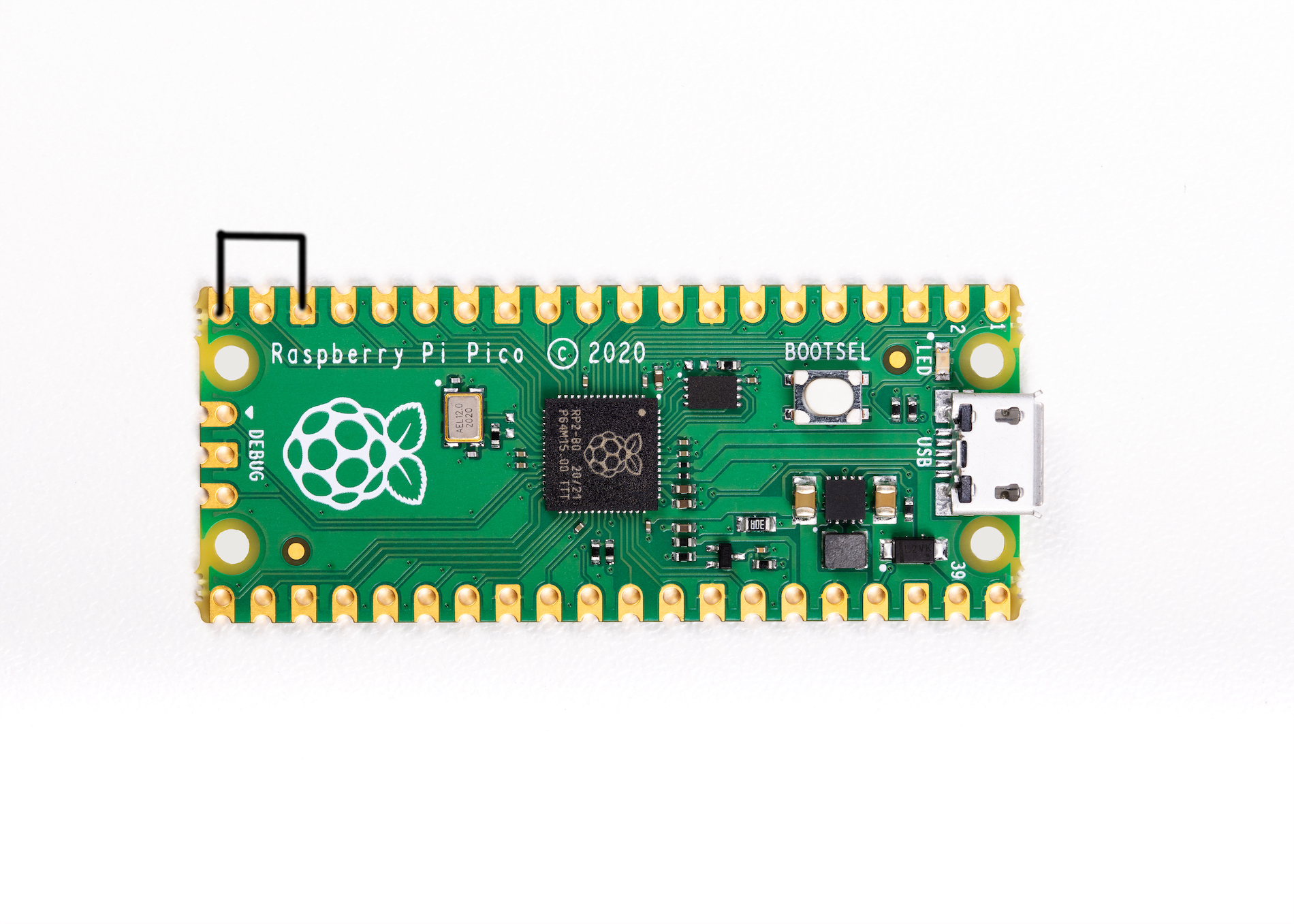 # 完整安装说明 在 5 分钟内完成安装并让您的 USB Rubber Ducky 开始工作。 1. 克隆仓库以获取文件的本地副本。 `git clone https://github.com/dbisu/pico-ducky.git` 2. 下载 [CircuitPython for the Raspberry Pi Pico](https://circuitpython.org/board/raspberry_pi_pico/)。*更新至 10.0.3 下载 [CircuitPython for the Raspberry Pi Pico W](https://circuitpython.org/board/raspberry_pi_pico_w/)。*更新至 10.0.3 下载 [CircuitPython for the Raspberry Pi Pico 2](https://circuitpython.org/board/raspberry_pi_pico2/)。*更新至 10.0.3 下载 [CircuitPython for the Raspberry Pi Pico 2W](https://circuitpython.org/board/raspberry_pi_pico2_w/)。*更新至 10.0.3 3. 按住 boot 按钮的同时将设备插入 USB 端口。它将显示为一个名为 `RPI-RP2` 的可移动媒体设备。 4. 将下载的 `.uf2` 文件复制到 Pico (`RPI-RP2`) 的根目录。设备将重启,大约一秒钟后,它将重新连接为 `CIRCUITPY`。 5. 在[此处](https://github.com/adafruit/Adafruit_CircuitPython_Bundle/releases/latest)下载 `adafruit-circuitpython-bundle-10.x-mpy-YYYYMMDD.zip` 并将其解压到设备外部。 6. 导航到刚解压文件夹中的 `lib`,并将 `adafruit_hid` 复制到您的 Raspberry Pi Pico 上的 `lib` 文件夹中。 7. 将 `adafruit_debouncer.mpy` 和 `adafruit_ticks.mpy` 复制到您的 Raspberry Pi Pico 上的 `lib` 文件夹中。 8. 将 `asyncio` 复制到您的 Pico 上的 `lib` 文件夹中。 9. 将 `adafruit_wsgi` 复制到您的 Pico 上的 `lib` 文件夹中。 10. 将您克隆中的 `boot.py` 复制到 Pico 的根目录。 11. 将 `duckyinpython.py`、`code.py`、`pins.py`、`webapp.py`、`wsgiserver.py` 复制到 Pico 的根文件夹。 12. *仅适用于 Pico W* 在 Pico W 的根目录中创建 `secrets.py` 文件。这包含 Pico W 要创建的 AP 名称和密码。 `secrets = { 'ssid' : "BadAPName", 'password' : "badpassword" }` 13. 在[此处](https://github.com/hak5/usbrubberducky-payloads)查找脚本或[使用 Ducky Script 创建您自己的脚本](https://docs.hak5.org/hak5-usb-rubber-ducky/ducky-script-basics/hello-world),并将其在 Pico 中保存为 `payload.dd`。目前,pico-ducky 仅支持 DuckyScript 1.0 和部分 3.0。 14. 请注意,如果您的设备未处于[设置模式](#setup-mode),设备将重启,半秒钟后脚本将运行。 15. **请注意:** 默认情况下,Pico W 不会显示为 USB 驱动器 ### Pico W Web 服务 Pico W AP 默认 IP 地址为 `192.168.4.1`。您应该能够在 `http://192.168.4.1:80` 找到网络服务。 网络服务上提供以下端点: ``` / /new /ducky /edit/
标签:BadUSB, CircuitPython, DuckyScript, HID攻击, Keystroke Injection, Pico W, Raspberry Pi Pico, USB Rubber Ducky, 低成本黑客工具, 物理安全, 硬件黑客, 网络安全, 自动化攻击, 逆向工具, 键盘模拟, 隐私保护