d3mocide/Sovereign_Watch
GitHub: d3mocide/Sovereign_Watch
分布式多情报融合平台,整合航空、海事、卫星、射频等多源 OSINT 数据,提供自托管的实时态势感知与战术地图能力。
Stars: 82 | Forks: 17
## 🌍 系统概述
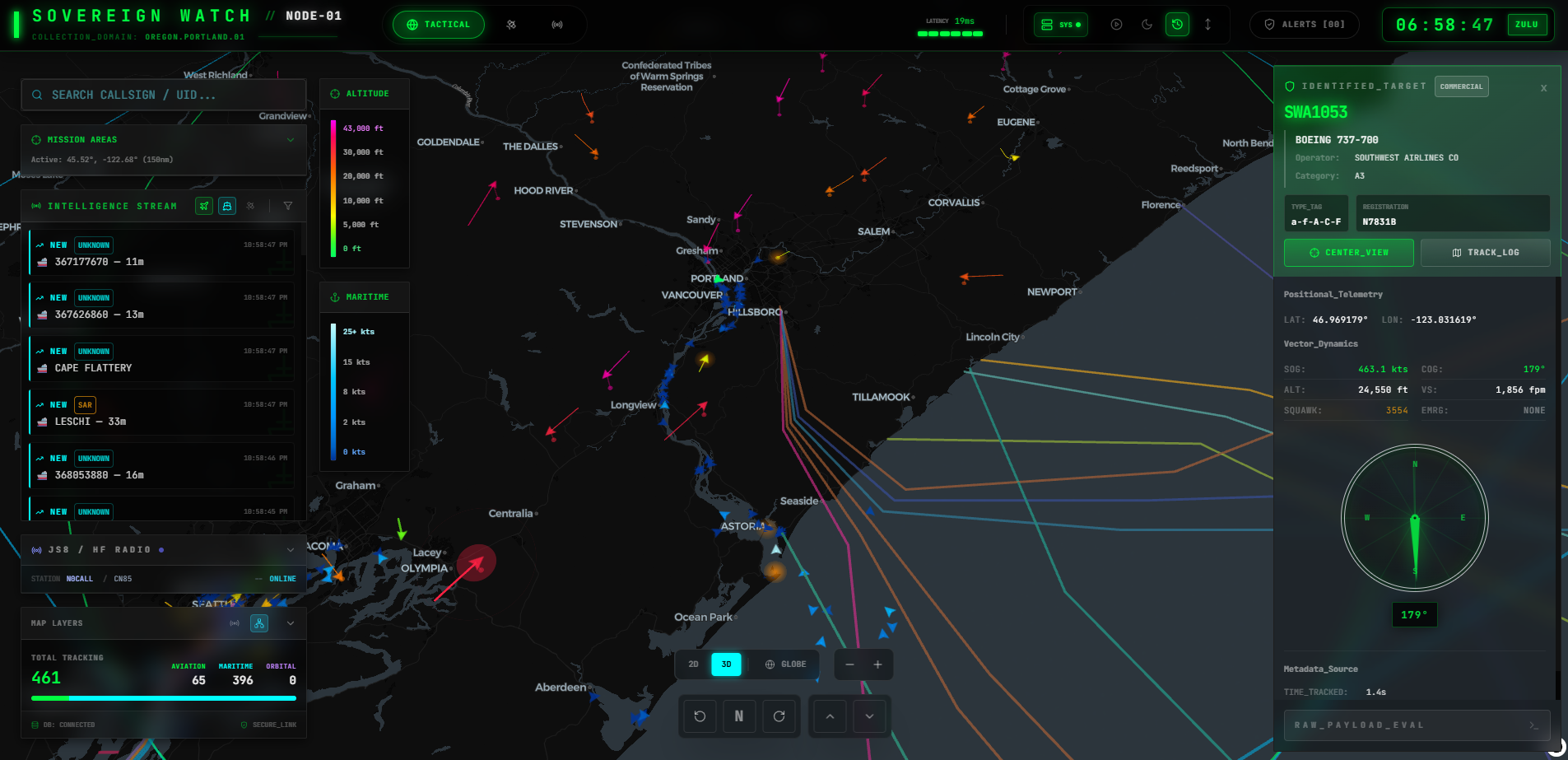
### 战术地图视图
### 轨道追踪

## 🛠️ 快速开始
### 前置条件
- Docker & Docker Compose
- NVIDIA Container Toolkit (如果使用 Local AI/Jetson)
### 安装
1. **克隆与配置**:
cp .env.example .env
# 使用您的密钥和配置编辑 .env:
# - CENTER_LAT / CENTER_LON (您的监控区域)
# - AISSTREAM_API_KEY (海事数据源)
# - ANTHROPIC_API_KEY / GEMINI_API_KEY (LLM 认知)
# - VITE_MAPBOX_TOKEN (3D 地形与地图)
# - KIWI_HOST / KIWI_PORT (JS8Call SDR 源)
# - MY_GRID (您的梅登黑德定位器)
2. **启动系统**:
docker compose up -d --build
3. **访问接口**:
- **战术地图 (UI)**: [http://localhost](http://localhost)
- **融合 API**: [http://localhost/api/docs](http://localhost/api/docs)
## ⚠️ 免责声明与责任
## 架构概述
```
graph TD
subgraph "Entry Point (Nginx)"
NG[Reverse Proxy :80]
end
subgraph "Ingestion (Python Pollers)"
A[ADS-B Network] -->|JSON| B(Ingestion Services)
C[AIS Stream] -->|JSON| B
Z[Orbital TLE Feed] -->|TLE| B
JS[Sovereign JS8Call] -->|UDP Bridge| B
RP[RF Repeaters] -->|REST API| B
B -->|TAK Protobuf| D(Redpanda Bus)
end
subgraph "Persistence (TimescaleDB)"
D -->|Stream| E[(Tracks Hypertable)]
D -->|Stream| F[(Vector Store)]
end
subgraph "Cognition (LiteLLM)"
G[Fusion API] -->|Query| H{AI Router}
H -->|Tier 1| I[Local Llama3]
H -->|Tier 3| CL[Claude]
end
subgraph "Presentation (React + Deck.gl)"
FE[MainHUD Shell] --> L[Intelligence Feed]
FE --> M[Projective Velocity Blending]
M -->|WebGL 3D| N[Mapbox / MapLibre Overlay]
FE --> O[Radio Terminal]
FE --> INF[Infrastructure Layers]
SC[Submarine Cables] -->|REST API| FE
end
NG -->|/| FE
NG -->|/api/| G
NG -->|/js8/| JS
```
## 🗂️ 数据源
所有上游数据均源自**公共、开放访问的网络**。基础运行不需要专有数据源。
### ✈️ 航空 (ADS-B)
Sovereign Watch 使用具有自动故障转移和指数退避功能的**多源轮询器**。
| 数据源 | URL | 备注 |
| :----------------- | :----------------------------------------------- | :------------------------------ |
| **adsb.fi** | [opendata.adsb.fi](https://opendata.adsb.fi) | 主要。无需密钥。 |
| **adsb.lol** | [api.adsb.lol](https://api.adsb.lol) | 主要。无需密钥。 |
| **airplanes.live** | [api.airplanes.live](https://api.airplanes.live) | 备用。限制为 1 次请求/30秒。 |
### 🚢 海事 (AIS)
| 数据源 | URL | 备注 |
| :--------------- | :----------------------------------- | :--------------------------------------------------------------------- |
| **AISStream.io** | [aisstream.io](https://aisstream.io) | WebSocket 流,需要 `AISSTREAM_API_KEY`。边界框过滤。 |
### 🛰️ 轨道 (卫星)
TLE 数据从 Celestrak 获取,并通过 SGP4 在本地进行传播。每 6 小时更新一次。
| 组 / 星座 | URL (`celestrak.org/NORAD/elements/...`) | 类别 |
| :--------------------- | :----------------------------------------------------------- | :------------ |
| **GNSS / 导航** | `gp.php?GROUP=gps-ops`, `glonass-ops`, `galileo`, `beidou` | `gps` |
| **气象 / 地球** | `gp.php?GROUP=weather`, `noaa`, `goes`, `resource` | `weather` |
| **通信** | `gp.php?GROUP=starlink`, `oneweb`, `iridium-NEXT`, `amateur` | `comms` |
| **情报 / ISR** | `gp.php?GROUP=military`, `radarsat`, `spire`, `planet` | `intel` |
| **LEO / 其他** | `gp.php?GROUP=stations`, `visual`, `cubesat`, `sarsat` | `leo` / `sar` |
### 📻 高频无线电 (KiwiSDR)
Sovereign Watch 使用公共 KiwiSDR 目录,根据与活跃任务区域的地理距离寻找最佳监听节点。
| 数据源 | URL | 备注 |
| :------------------- | :------------------------------------------------------------------------------- | :------------------------------- |
| **rx.linkfanel.net** | [rx.linkfanel.net/kiwisdr_com.js](http://rx.linkfanel.net/kiwisdr_com.js) | 主要公共目录镜像。 |
| **Skywave Linux** | [rx.skywavelinux.com/kiwisdr_com.js](https://rx.skywavelinux.com/kiwisdr_com.js) | 备用目录镜像。 |
### 📻 RF 基础设施 (中继器)
| 数据源 | URL | 备注 |
| :--------------- | :------------------------------------------------------------------ | :-------------------------------------------------------------------------------------------------------- |
| **RepeaterBook** | [repeaterbook.com/api](https://www.repeaterbook.com/api/export.php) | 需要 API 密钥。(正在努力使应用获得批准)服务器端代理以避免 CORS。客户端缓存 24 小时。 |
### 🌊 海底基础设施 (海底光缆)
| 数据源 | URL | 备注 |
| :---------------------- | :--------------------------------------------------------------------- | :------------------------------------------------------------------------------ |
| **Submarine Cable Map** | [submarinecablemap.com/api](https://www.submarinecablemap.com/api/v3/) | 无需密钥。包括光缆路由和登陆点。客户端缓存 24 小时。 |
## 🛡️ 战术设计 ("Sovereign Glass")
| 设计原则 | 实现细节 |
| :----------------------------- | :--------------------------------------------------------------------------------------------------------------------------------------------------------------- |
| **双重操作模式** | 在**战术地图**(航空、海事、基础设施)和**轨道地图**(卫星)之间即时切换,以保持对相关领域的关注。 |
| **V形标优先架构** | 所有资产统一的定向追踪器;无传统点标记。 |
| **混合 3D 引擎** | 根据配置在 **Mapbox 3D**(地形/卫星)和 **CARTO Dark Matter**(矢量/本地)之间无缝切换。 |
| **高保真 HUD** | 集成全局 TopBar,具有同步的时间参考 (UTC)、实时实体追踪侧边栏和活跃情报源。 |
| **沉浸层** | 微噪点纹理和战术网格叠加层,营造专业监控美学。 |
| **交互式矢量** | 可点击的 V 形标,用于目标锁定、历史轨迹检查、实体遥测下钻和战术时间旅行(回放)。 |
## 🗼 战术指示器
### 资产符号
| 符号 / 指示器 | 战术含义 |
| :------------------- | :-------------------------------------------------------------------------------------------------------------------------------------------------------------------------------- |
| **V 形标** | 指示方向航向和资产类型(航空/海事)。悬停/点击可显示目标的具体分类。 |
| **星形** | 轨道资产(卫星)。渲染在地面轨迹位置,并带有预测轨道路径。 |
| **脉动环** | 活跃遥测更新。选中资产时强度增加。 |
| **战术轮廓** | 高价值/特殊资产(SAR, 军事, 执法船只, 无人机, 直升机)发出发光的**战术橙色**特征光环,以便操作员即时识别。 |
### 智能颜色编码
战术地图使用动态的“热力”梯度来可视化关键元数据:
**航空 (高度)**
- 🟢 **绿色**: 停飞 / 低空 (< 5,000ft)
- 🟡 **黄色**: 低空 / 进近 (~ 10,000ft)
- 🟠 **橙色**: 中空 爬升/下降 (~ 20,000ft)
- 🔴 **红色**: 高空 巡航 (~ 30,000ft)
- 🟣 **品红色**: 超高空 (> 40,000ft)
**海事 (速度)**
- 🔵 **深蓝色**: 静止 / 抛锚 (0 kts)
- 🟦 **中蓝色**: 港口速度 / 巡逻 (< 10 kts)
- 🩵 **浅蓝色**: 巡航 (~ 15 kts)
- ⚪ **青色/白色**: 高速过境 (25+ kts)
**轨道 (类别)**
- 💎 **天蓝色**: GPS & 导航星座
- 🟠 **琥珀色**: 气象 & 环境监测
- 🟢 **翠绿色**: 通信 & 互联网 (Starlink/OneWeb)
- 🔴 **玫瑰色**: 监视 & 已知 ISR 卫星
- ⚪ **灰色**: 其他 / 未分类卫星
**基础设施 (系统)**
- 🟢 **翠绿色**: RF 基础设施 (业余无线电中继器, JS8Call 电台)
- 🔵 **青色**: 海底基础设施 (海底光缆, 登陆站)
## 🔍 核心能力
| 能力 | 战术描述 |
| :------------------------------- | :--------------------------------------------------------------------------------------------------------------------------------------- |
| **深度船只分类** | 实时解析海事 `ShipStaticData`,以绝对精度分类油轮、货船、军舰、SAR 和客轮。 |
| **轨道脉冲追踪** | 使用 Celestrak TLE 获取和实时 SGP4 传播的端到端卫星追踪(60fps PVB 运动和地面轨迹)。 |
| **海底基础设施** | 全球可视化海底光缆网络和战略登陆站,并可访问运行状态。 |
| **RF 基础设施感知** | 全面映射战区内的业余无线电中继器网络,以便立即访问通信中继。 |
| **JS8Call 信号情报** | 集成的 HF 数字模式 (JS8) 无线电桥接和交互式 HUD 终端,用于实时战术通信。 |
| **投射速度混合** | 基于物理的运动学渲染确保快速移动的飞机在延迟的应答机 Ping 之间平滑滑行。 |
| **跨域战术警报** | 自动检测 HUD 通知紧急应答机代码、海事遇险 (AIS-SART) 和即将到来的情报卫星飞越。 |
| **精细过滤矩阵** | 先进的 HUD 工具用于去除视觉噪声。按特定子类(例如无人机或军用)过滤战区。 |
| **时间旅行** | 所有位置数据均写入 TimescaleDB。操作员可以在本地回放数小时或数天前的战术情况。 |
## 📂 目录结构
| 路径 | 用途 | Git 状态 |
| :------------------- | :--------------------------------------------------- | :---------- |
| `/AGENTS.md` | **AI 开发者主指南(首选阅读此文档)** | **已跟踪** |
| `/.agent` | Agent 内存、技能和全局项目规则。 | **已跟踪** |
| `/backend/ingestion` | Python 多源轮询框架。 | **已跟踪** |
| `/backend/db` | 数据库模式 (`init.sql`) 和迁移脚本。 | **已跟踪** |
| `/backend/api` | 用于融合和分析的 Python FastAPI 服务。 | **已跟踪** |
| `/js8call` | JS8Call HF 无线电终端容器和桥接。 | **已跟踪** |
| `/frontend` | React + Vite 应用程序(战术地图 + HUD)。 | **已跟踪** |
| `/docs` | 架构计划、研究和进度日志。 | **已跟踪** |
## 🤖 AI Agent 协议
此代码库具有 **Agent 感知能力**。如果您是为本项目做贡献的 AI 助手:
1. **阅读规则**:您**必须**在会话开始时阅读 `AGENTS.md`。它是权威的入口点。
2. **环境协议**:切勿直接在主机上运行命令。始终使用规则中定义的 **Docker Compose** 命令。
3. **通信**:所有服务间数据必须遵守 `tak.proto` 中定义的 **TAK Protocol (Protobuf)**。
4. **美学**:所有 UI 修改必须遵循“Sovereign Glass”设计原则。
## 🧪 开发工作流
### 🐳 “容器优先”规则
**切勿**直接在主机上运行命令(`npm`, `node`, `python`, `pip` 等)。所有交互和执行必须通过 **Docker Compose** 进行。
- **启动服务**: `docker compose up -d` (或在依赖更改后执行 `docker compose up -d --build
`)
- **运行一次性任务**: `docker compose run --rm `
- **查看日志**: `docker compose logs -f `
### ⚡ 实时更新 (HMR)
前端和后端服务均配置了 **热模块替换**:
- **前端**: 保存任何 `.tsx`/`.ts`/`.css` 文件。Vite 自动即时同步更改(轮询,1秒间隔)。**无需重启。**
- **后端**: 保存任何 `.py` 文件。Uvic 自动重新加载。**无需重启。**
- **数据获取/杂项服务**: 配置更改后有时需要重启(`docker compose restart `)。
## 🏆 致谢与技术栈
Sovereign Watch 建立在巨人的肩膀上。我们对以下核心技术的维护者表示深深的感谢:
- **[JS8Call](http://js8call.com/)**: 用于弱信号战术通信的鲁棒 HF 数字模式协议。
- **[KiwiSDR](http://kiwisdr.com/)**: 软件定义无线电的全球网络,实现超视距情报收集。
- **[Docker](https://www.docker.com/)**: 容器化引擎,实现无缝的边缘到云端部署。
- **[Deck.gl](https://deck.gl/)**: 高性能 WebGL2 空间渲染。
- **[MapLibre GL JS](https://maplibre.org/) / [Mapbox GL JS](https://www.mapbox.com/)**: 核心制图引擎和球体地球投影。
- **[TimescaleDB](https://www.timescale.com/)**: 重型时间序列遥测持久化。
- **[Redpanda](https://redpanda.com/)**: 高吞吐量 Kafka 兼容流总线。
- **[Celestrak](https://celestrak.org/)**: 至关重要的轨道数据传播和 TLE 分发。
- **[FastAPI](https://fastapi.tiangolo.com/) & [React](https://react.dev/)**: 驱动融合中心的核心架构。
Sovereign Watch © 2026
由 d3FRAG Networks & The Antigravity Agent Team 维护。
🔼 返回顶部
标签:3D地图, ADS-B, AIS, API, Docker, ESC4, GitHub, HTTP/HTTPS抓包, Jetson, JS8Call, KiwiSDR, LLM, Mapbox, OSINT, Python, SDR, Unmanaged PE, 人工智能, 分布式系统, 响应大小分析, 多源情报融合, 安全防御评估, 实时处理, 实时遥测, 密码管理, 态势感知, 情报中心, 战术地图, 数据主权, 无后门, 海洋监测, 用户模式Hook绕过, 自动化攻击, 自托管, 航天, 航空监测, 请求拦截, 轨道追踪, 软件无线电, 边缘计算, 逆向工具
 # Sovereign Watch
### 分布式多情报融合中心
# Sovereign Watch
### 分布式多情报融合中心