dorianborian/sesame-robot
GitHub: dorianborian/sesame-robot
一个基于ESP32的低成本开源四足机器人,专为创客和教育场景设计,支持WiFi远程控制、自定义动画编程和语音交互。
Stars: 2901 | Forks: 396
# Sesame 机器人项目






 **来自你新好朋友的问候。**
Sesame 是一个基于 ESP32 微控制器系统的易于上手的开源机器人项目,侧重于表现力与运动。
本项目专为各种技能水平的创客和工程师设计!Sesame 提供了一个动态平台,旨在帮助用户开始接触行走机器人。
要构建一个 Sesame 机器人,你需要具备基本的焊接技能、价值 50-60 美元的硬件组件、使用 3D 打印机的权限,以及对 Arduino IDE 的基本了解。
本仓库包含 CAD 设计文件、STL 文件、构建和接线指南,以及用于基于 ESP32 控制器的基础/扩展固件。
其中还包含一些调试固件,可能有助于让你的 Sesame 正常运转。
## 功能特性
* **四足设计:** 使用 8 个舵机(每条腿 2 个)实现大约 8 个总自由度。
* **表情显示:** 配备一个 128x64 OLED 屏幕作为反应灵敏的面部,与动作同步。
* **全打印:** 完全设计用于 PLA 3D 打印,仅需极少支撑。
* **网络连接:** 连接到你的 WiFi 网络以进行远程控制和 API 访问。
* **JSON API:** RESTful API,支持从 Python、JavaScript 等进行编程控制。
* **对话面部:** 富有表现力的情感库,包含用于语音助手项目的对话变体。
* **Sesame Studio:** 全新的动画制作软件,可轻松创建自定义动作。
* **Sesame 伴侣应用:** 用于语音控制和高级交互的 Python 应用程序。
* **串口 CLI:** 通过串行命令行界面或 Web UI 控制机器人并触发动画。
* **预编程表情:** 包含行走、挥手、跳舞、指指、休息等动画。
## 在 YouTube 上观看发布视频
**来自你新好朋友的问候。**
Sesame 是一个基于 ESP32 微控制器系统的易于上手的开源机器人项目,侧重于表现力与运动。
本项目专为各种技能水平的创客和工程师设计!Sesame 提供了一个动态平台,旨在帮助用户开始接触行走机器人。
要构建一个 Sesame 机器人,你需要具备基本的焊接技能、价值 50-60 美元的硬件组件、使用 3D 打印机的权限,以及对 Arduino IDE 的基本了解。
本仓库包含 CAD 设计文件、STL 文件、构建和接线指南,以及用于基于 ESP32 控制器的基础/扩展固件。
其中还包含一些调试固件,可能有助于让你的 Sesame 正常运转。
## 功能特性
* **四足设计:** 使用 8 个舵机(每条腿 2 个)实现大约 8 个总自由度。
* **表情显示:** 配备一个 128x64 OLED 屏幕作为反应灵敏的面部,与动作同步。
* **全打印:** 完全设计用于 PLA 3D 打印,仅需极少支撑。
* **网络连接:** 连接到你的 WiFi 网络以进行远程控制和 API 访问。
* **JSON API:** RESTful API,支持从 Python、JavaScript 等进行编程控制。
* **对话面部:** 富有表现力的情感库,包含用于语音助手项目的对话变体。
* **Sesame Studio:** 全新的动画制作软件,可轻松创建自定义动作。
* **Sesame 伴侣应用:** 用于语音控制和高级交互的 Python 应用程序。
* **串口 CLI:** 通过串行命令行界面或 Web UI 控制机器人并触发动画。
* **预编程表情:** 包含行走、挥手、跳舞、指指、休息等动画。
## 在 YouTube 上观看发布视频
 ## 入门指南
按照以下步骤构建你自己的 Sesame 机器人:
### 1. 收集零件
查看 **[物料清单 (BOM)](hardware/bom/README.md)** 获取所需电子元件和硬件的完整列表。
* 微控制器:Lolin S2 Mini(推荐用于 DIY 构建)、Sesame Distro Board V2(包含在构建套件中,预刷写)或带 Distro Board V1 的 ESP32-DevKitC-32E(旧版)
* 执行器:8x MG90 舵机
* 电源:5V 3A 电源(用于 S2 Mini 和 V2 Distro Board 的 USB-C PD,或电池 + 降压转换器;关于 2× 10440 锂离子电池 + 2× AAA 电池盒选项,请参阅 BOM)
### 2. 打印零件
下载 STL 文件并遵循 **[打印指南](hardware/printing/README.md)**。
* 专为 PLA 设计
* 仅需极少支撑
### 3. 组装与接线
遵循 **[构建指南](docs/build-guide/README.md)** 和 **[接线指南](docs/wiring-guide/README.md)** 来组装框架并连接电子元件。
### 4. 刷写固件
从 **[固件目录](firmware/README.md)** 上传代码。
* 需要 Arduino IDE
* 配置 WiFi AP 设置
### 5. 创建动画
使用 **[Sesame Studio](software/sesame-studio/README.md)** 为你的机器人直观地设计姿势和序列。
## 入门指南
按照以下步骤构建你自己的 Sesame 机器人:
### 1. 收集零件
查看 **[物料清单 (BOM)](hardware/bom/README.md)** 获取所需电子元件和硬件的完整列表。
* 微控制器:Lolin S2 Mini(推荐用于 DIY 构建)、Sesame Distro Board V2(包含在构建套件中,预刷写)或带 Distro Board V1 的 ESP32-DevKitC-32E(旧版)
* 执行器:8x MG90 舵机
* 电源:5V 3A 电源(用于 S2 Mini 和 V2 Distro Board 的 USB-C PD,或电池 + 降压转换器;关于 2× 10440 锂离子电池 + 2× AAA 电池盒选项,请参阅 BOM)
### 2. 打印零件
下载 STL 文件并遵循 **[打印指南](hardware/printing/README.md)**。
* 专为 PLA 设计
* 仅需极少支撑
### 3. 组装与接线
遵循 **[构建指南](docs/build-guide/README.md)** 和 **[接线指南](docs/wiring-guide/README.md)** 来组装框架并连接电子元件。
### 4. 刷写固件
从 **[固件目录](firmware/README.md)** 上传代码。
* 需要 Arduino IDE
* 配置 WiFi AP 设置
### 5. 创建动画
使用 **[Sesame Studio](software/sesame-studio/README.md)** 为你的机器人直观地设计姿势和序列。
 ## 软件与固件
### Sesame Studio
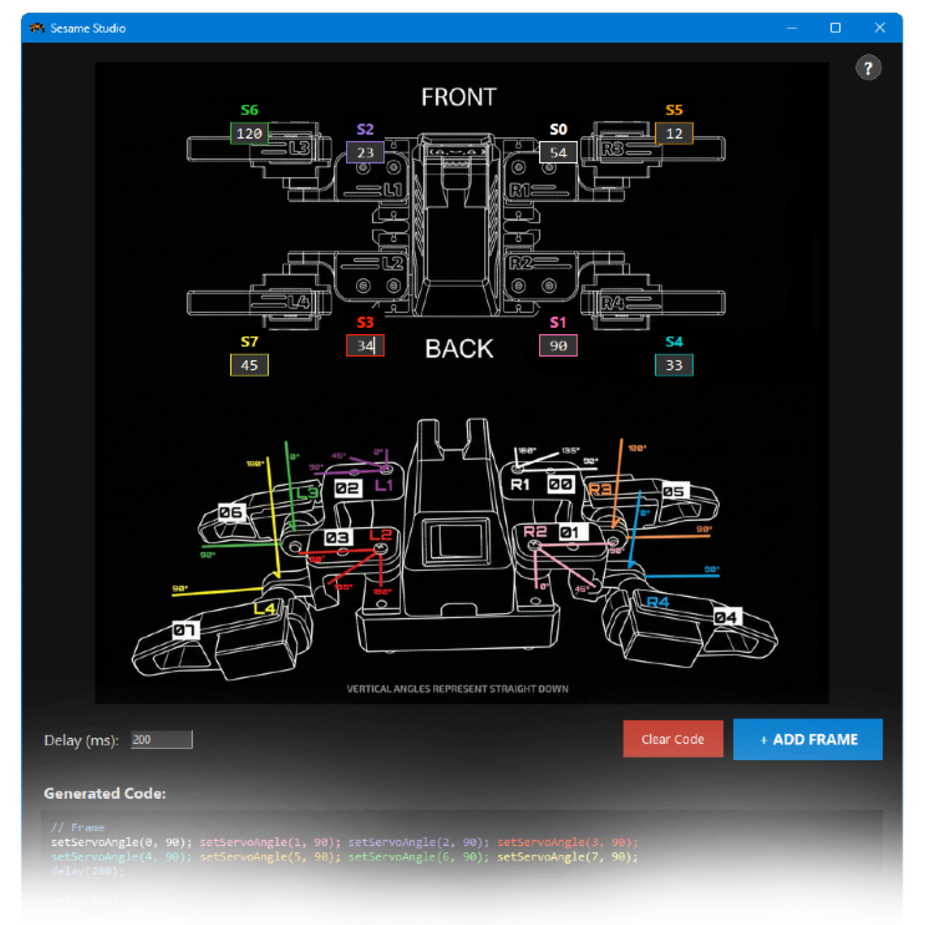
Sesame Studio 是包含在 `software/sesame-studio/` 中的独立桌面应用程序。它允许你:
* 使用原理图界面直观地调整机器人姿势。
* 自动生成舵机角度的 C++ 代码。
* 将帧序列化为复杂的动画。
[**> 前往 Sesame Studio**](software/sesame-studio/README.md)
## 软件与固件
### Sesame Studio
Sesame Studio 是包含在 `software/sesame-studio/` 中的独立桌面应用程序。它允许你:
* 使用原理图界面直观地调整机器人姿势。
* 自动生成舵机角度的 C++ 代码。
* 将帧序列化为复杂的动画。
[**> 前往 Sesame Studio**](software/sesame-studio/README.md)
 ### Sesame 伴侣应用
Sesame 伴侣应用是一个基于 Python 的应用程序,可通过本地网络实现对机器人的高级控制和交互。它利用新的 JSON API 和网络模式功能提供:
* **语音助手集成:** 使用语音命令控制 Sesame 并查看实时情感表达。
* **远程控制:** 从本地网络上的任何位置指挥你的机器人。
* **面部控制:** 根据对话或上下文动态更改表情。
* **API 示例:** 用于构建你自己的集成的参考实现。
伴侣应用与运行启用了网络模式的最新固件的机器人配合使用。
[**> 前往 Sesame 伴侣应用仓库**](https://github.com/dorianborian/sesame-companion-app)
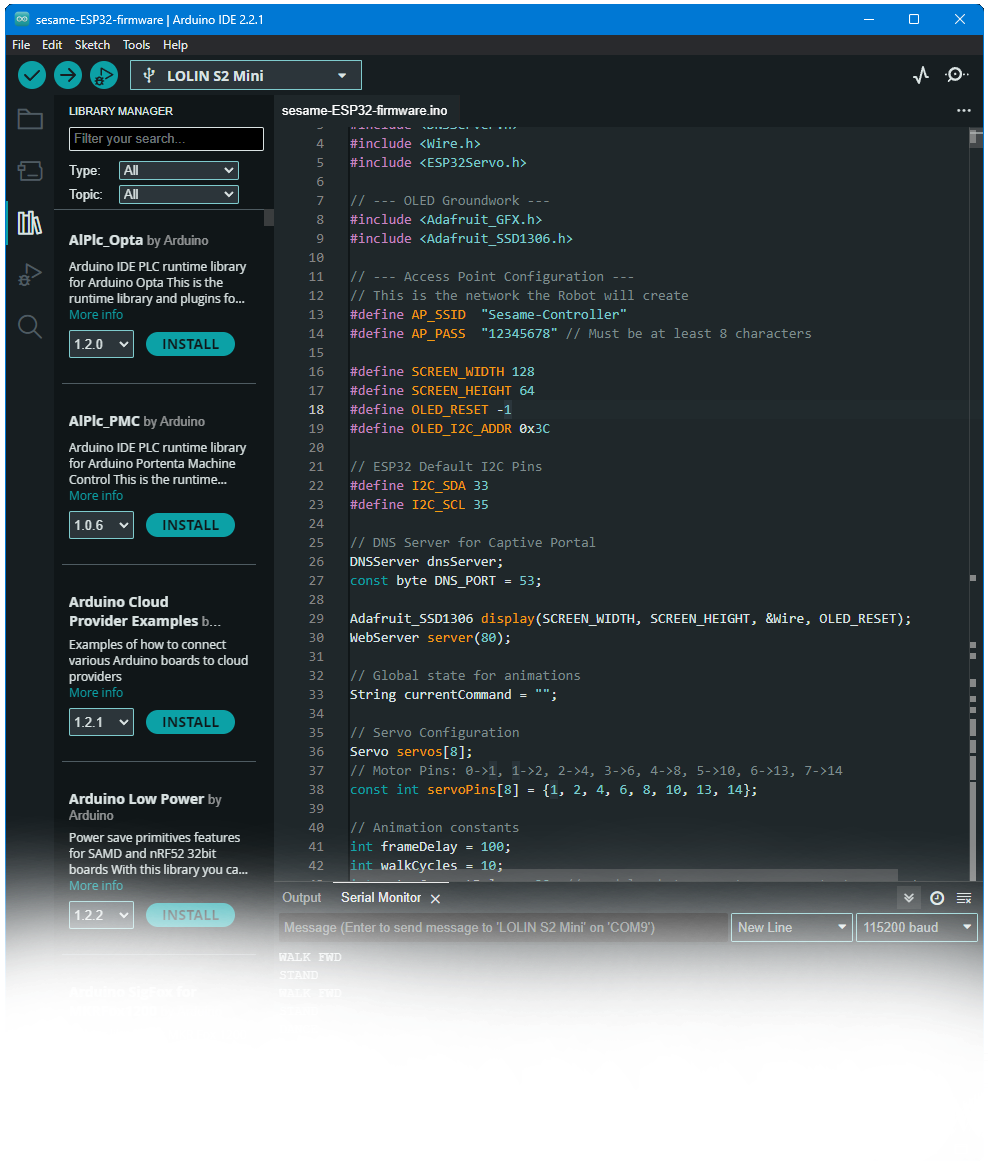
### 固件
ESP32 固件(`sesame-firmware-main.ino`)处理运动学、面部显示和 WiFi 控制界面。
* **Web UI:** 通过内置 Access Point 从手机控制机器人。
* **自定义面部:** 添加你自己的位图(指南在固件文档中)。
[**> 前往固件文档**](firmware/README.md)
### Sesame 伴侣应用
Sesame 伴侣应用是一个基于 Python 的应用程序,可通过本地网络实现对机器人的高级控制和交互。它利用新的 JSON API 和网络模式功能提供:
* **语音助手集成:** 使用语音命令控制 Sesame 并查看实时情感表达。
* **远程控制:** 从本地网络上的任何位置指挥你的机器人。
* **面部控制:** 根据对话或上下文动态更改表情。
* **API 示例:** 用于构建你自己的集成的参考实现。
伴侣应用与运行启用了网络模式的最新固件的机器人配合使用。
[**> 前往 Sesame 伴侣应用仓库**](https://github.com/dorianborian/sesame-companion-app)
### 固件
ESP32 固件(`sesame-firmware-main.ino`)处理运动学、面部显示和 WiFi 控制界面。
* **Web UI:** 通过内置 Access Point 从手机控制机器人。
* **自定义面部:** 添加你自己的位图(指南在固件文档中)。
[**> 前往固件文档**](firmware/README.md)
**来自你新好朋友的问候。**
Sesame 是一个基于 ESP32 微控制器系统的易于上手的开源机器人项目,侧重于表现力与运动。
本项目专为各种技能水平的创客和工程师设计!Sesame 提供了一个动态平台,旨在帮助用户开始接触行走机器人。
要构建一个 Sesame 机器人,你需要具备基本的焊接技能、价值 50-60 美元的硬件组件、使用 3D 打印机的权限,以及对 Arduino IDE 的基本了解。
本仓库包含 CAD 设计文件、STL 文件、构建和接线指南,以及用于基于 ESP32 控制器的基础/扩展固件。
其中还包含一些调试固件,可能有助于让你的 Sesame 正常运转。
## 功能特性
* **四足设计:** 使用 8 个舵机(每条腿 2 个)实现大约 8 个总自由度。
* **表情显示:** 配备一个 128x64 OLED 屏幕作为反应灵敏的面部,与动作同步。
* **全打印:** 完全设计用于 PLA 3D 打印,仅需极少支撑。
* **网络连接:** 连接到你的 WiFi 网络以进行远程控制和 API 访问。
* **JSON API:** RESTful API,支持从 Python、JavaScript 等进行编程控制。
* **对话面部:** 富有表现力的情感库,包含用于语音助手项目的对话变体。
* **Sesame Studio:** 全新的动画制作软件,可轻松创建自定义动作。
* **Sesame 伴侣应用:** 用于语音控制和高级交互的 Python 应用程序。
* **串口 CLI:** 通过串行命令行界面或 Web UI 控制机器人并触发动画。
* **预编程表情:** 包含行走、挥手、跳舞、指指、休息等动画。
## 在 YouTube 上观看发布视频
## 入门指南
按照以下步骤构建你自己的 Sesame 机器人:
### 1. 收集零件
查看 **[物料清单 (BOM)](hardware/bom/README.md)** 获取所需电子元件和硬件的完整列表。
* 微控制器:Lolin S2 Mini(推荐用于 DIY 构建)、Sesame Distro Board V2(包含在构建套件中,预刷写)或带 Distro Board V1 的 ESP32-DevKitC-32E(旧版)
* 执行器:8x MG90 舵机
* 电源:5V 3A 电源(用于 S2 Mini 和 V2 Distro Board 的 USB-C PD,或电池 + 降压转换器;关于 2× 10440 锂离子电池 + 2× AAA 电池盒选项,请参阅 BOM)
### 2. 打印零件
下载 STL 文件并遵循 **[打印指南](hardware/printing/README.md)**。
* 专为 PLA 设计
* 仅需极少支撑
### 3. 组装与接线
遵循 **[构建指南](docs/build-guide/README.md)** 和 **[接线指南](docs/wiring-guide/README.md)** 来组装框架并连接电子元件。
### 4. 刷写固件
从 **[固件目录](firmware/README.md)** 上传代码。
* 需要 Arduino IDE
* 配置 WiFi AP 设置
### 5. 创建动画
使用 **[Sesame Studio](software/sesame-studio/README.md)** 为你的机器人直观地设计姿势和序列。
### Sesame 伴侣应用
Sesame 伴侣应用是一个基于 Python 的应用程序,可通过本地网络实现对机器人的高级控制和交互。它利用新的 JSON API 和网络模式功能提供:
* **语音助手集成:** 使用语音命令控制 Sesame 并查看实时情感表达。
* **远程控制:** 从本地网络上的任何位置指挥你的机器人。
* **面部控制:** 根据对话或上下文动态更改表情。
* **API 示例:** 用于构建你自己的集成的参考实现。
伴侣应用与运行启用了网络模式的最新固件的机器人配合使用。
[**> 前往 Sesame 伴侣应用仓库**](https://github.com/dorianborian/sesame-companion-app)
### 固件
ESP32 固件(`sesame-firmware-main.ino`)处理运动学、面部显示和 WiFi 控制界面。
* **Web UI:** 通过内置 Access Point 从手机控制机器人。
* **自定义面部:** 添加你自己的位图(指南在固件文档中)。
[**> 前往固件文档**](firmware/README.md)
标签:3D打印, Arduino, C++, DIY机器人, ESP32, Homebrew安装, JSON, OLED显示, RESTful API, STEM教育, WiFi控制, 二次开发, 伺服电机, 低成本机器人, 创客项目, 四足机器人, 客户端加密, 客户端加密, 嵌入式系统, 幻觉检测, 开源硬件, 微型机器人, 拟人化表情, 提示词优化, 数据擦除, 智能硬件, 机器人, 桌面机器人, 物联网, 硬件教程, 语音交互, 运动学, 运动控制, 逆向工具